XELA Robotics llevará a Automate 2026 una ampliación de su familia uSkin que apunta a una limitación muy concreta de la manipulación robótica: no basta con que una mano tenga una yema blanda y sensible si necesita enganchar el canto de una tarjeta, rascar una cinta o entrar en una ranura estrecha.
La compañía, nacida como spin-out de Waseda University, presentará en Chicago una punta robótica con uña sensorizada, integración con la interfaz abierta UMI, compensación de interferencias magnéticas, mejoras para agarre delicado, cubiertas más resistentes y detección automática de peso y dureza. No es un robot completo, pero sí una de esas piezas pequeñas que pueden marcar la diferencia entre una demo de agarre y una tarea útil.
Una uña con datos de fuerza
Según la nota distribuida por PR Newswire, la novedad principal es un dedo robótico con una uña sensible a fuerza de seis ejes y 30 puntos triaxiales repartidos en la yema. La idea es complementar el contacto blando de la punta del dedo con una zona rígida capaz de medir fuerzas cuando el robot usa el borde de la uña.
Ese detalle importa porque muchas acciones humanas dependen justo de esa geometría. Para coger una tarjeta plana de una mesa, levantar una llave, despegar una cinta o hacer palanca sobre un borde pequeño, la yema no siempre es suficiente. Una superficie blanda puede adaptarse bien al objeto, pero también tiene dificultades para entrar en huecos finos o aplicar fuerza concentrada sin perder información de contacto.
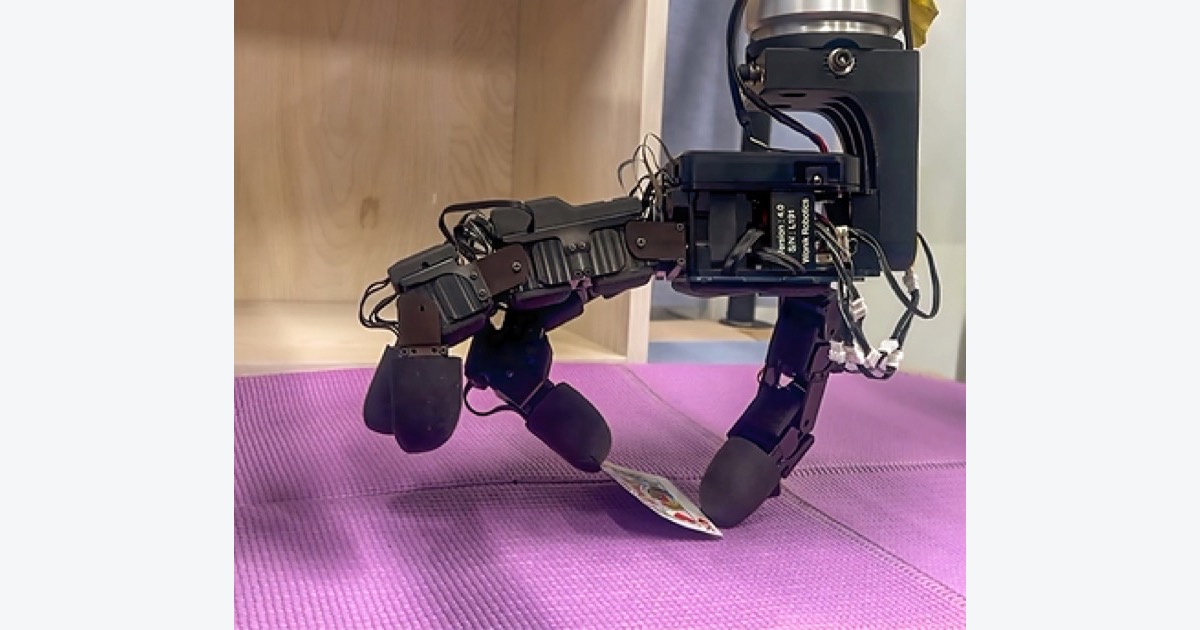
El paper técnico asociado, titulado A uSkin Fingertip with a Tactile Fingernail for Contact-Rich Dexterous Manipulation, describe el mismo enfoque con más detalle. El diseño añade una uña rígida con sensado fuerza-par de 6D y mantiene la medición densa en la almohadilla del dedo. En las pruebas, el sistema se evaluó con un brazo UR5e y un sensor de fuerza-par en muñeca para estimar contacto desde varias direcciones.
La demostración más fácil de entender es la manipulación de una tarjeta. En el experimento de aprendizaje por imitación citado en el paper, la política con señal de uña consiguió 13 éxitos de 20 frente a 11 de 20 sin esa entrada táctil. Es una mejora modesta, no una solución definitiva, pero reduce un fallo muy típico: que el dedo no llegue a enganchar el borde antes de transferir el objeto a la yema.
Tacto para manos y pinzas ya existentes
XELA insiste en que uSkin no está pensado solo para una mano propietaria. En su página oficial de productos, la empresa divide la familia entre sensores para pinzas, manos robóticas y superficies personalizadas. Hay integraciones para grippers de Robotiq, Weiss Robotics y manos como Allegro, LEAP o soluciones ligadas a iCub.
Ese enfoque hardware-agnostic es relevante para fábricas y laboratorios. La manipulación diestra no avanzará si cada nueva señal táctil exige rediseñar la mano completa o cambiar de robot. XELA intenta vender una capa de tacto que pueda añadirse a manos y pinzas ya conocidas, con sensores uSkin Protect para grippers y uSkin Curved para puntas de dedos.
La compañía también llega a Automate con una integración en la Universal Manipulation Interface, el gripper abierto usado para capturar demostraciones humanas y transferir destrezas a robots. Según XELA, uSkin añade medidas distribuidas de vector de fuerza a ese flujo de datos. La lectura prudente es clara: si los modelos de acción van a aprender de humanos, no conviene que solo vean vídeo y posiciones; también necesitan saber qué contacto, presión o deslizamiento hizo viable la tarea.
Otro bloque menos vistoso, pero práctico, es la compensación de interferencias magnéticas. En entornos industriales hay piezas ferromagnéticas, imanes, clips y utillaje metálico que pueden contaminar sensores basados en campos magnéticos. XELA afirma que su nueva compensación permite retirar interferencias complejas, un punto crítico si se quiere llevar el tacto fuera de mesas de laboratorio limpias.
El avance está en cerrar el bucle físico
La noticia encaja con una tendencia más amplia en IA física. En las últimas semanas han aparecido varias propuestas centradas en manos, dedos, grippers y bancos de datos táctiles. El patrón se repite: la visión ayuda a localizar el mundo, pero el contacto decide si el robot realmente ha agarrado, enganchado, presionado o deformado el objeto como esperaba.
XELA mostrará estas mejoras en el Humanoid Robot Pavilion de Automate 2026, en el stand 1888, con demos sobre manos Tesollo y Allegro y pinzas Robotiq Hand-E y 2F. La compañía también plantea pruebas con una grulla de origami y un huevo de codorniz, dos objetos elegidos precisamente porque penalizan tanto la falta de delicadeza como la falta de información física.
Conviene mantener el listón alto. Un dedo sensorizado no convierte automáticamente una mano robótica en una mano humana, y una tasa de éxito de laboratorio no demuestra robustez industrial. Faltan datos de coste, vida útil, facilidad de calibración, integración de software y comportamiento tras miles de ciclos con polvo, golpes o cambios de objeto.
Aun así, el ángulo es sólido. La carrera por la manipulación robótica no se resolverá solo con modelos más grandes ni con manos más antropomórficas. También hará falta instrumentar mejor los puntos donde el robot toca el mundo. Si uSkin consigue hacer ese tacto más modular y más fácil de integrar, la uña sensorizada de XELA puede ser menos espectacular que un humanoide completo, pero mucho más útil para que los robots aprendan a manipular objetos reales.
Fuentes
- PR Newswire — XELA Robotics presenta nuevas capacidades uSkin para Automate 2026 [en]
- XELA Robotics — página oficial de productos uSkin [en]
- XELA Robotics — hoja de ruta 2026 e integración con Tesollo DG-5F [en]
- OpenReview — paper técnico sobre uSkin Fingertip with a Tactile Fingernail [en]
- Imagen: PR Newswire — demostración oficial de XELA Robotics con uña sensorizada [en]