
Asimov vuelve a moverse en X con una promesa más concreta que la que circuló en sus primeros vídeos virales: la compañía afirma que la próxima semana abrirá el cuerpo completo de Asimov V1, un humanoide con 25 grados de libertad activos de la cabeza a los pies. La novedad importa porque reduce parte de la ambigüedad inicial del proyecto. Ya no estamos solo ante un clip llamativo y una narrativa maker atractiva, sino ante una hoja de ruta que empieza a conectarse con una documentación técnica más amplia, un manual público y un BOM accesible.
Aun así, conviene mantener el matiz. Asimov sigue siendo, ante todo, una apuesta por una plataforma humanoide abierta para builders, investigadores y equipos técnicos, no un producto comercial maduro al estilo de los grandes fabricantes del sector. Y eso no es una debilidad: puede ser justo su principal valor si consigue ejecutar bien.
Del viral inicial a una propuesta técnica más verificable
Cuando Asimov empezó a circular con fuerza por redes, el foco estaba en una idea irresistible: un humanoide open source, montable en formato DIY y con un coste potencial muy inferior al de las grandes plataformas cerradas. El problema era que la documentación pública disponible entonces dejaba más preguntas que respuestas.
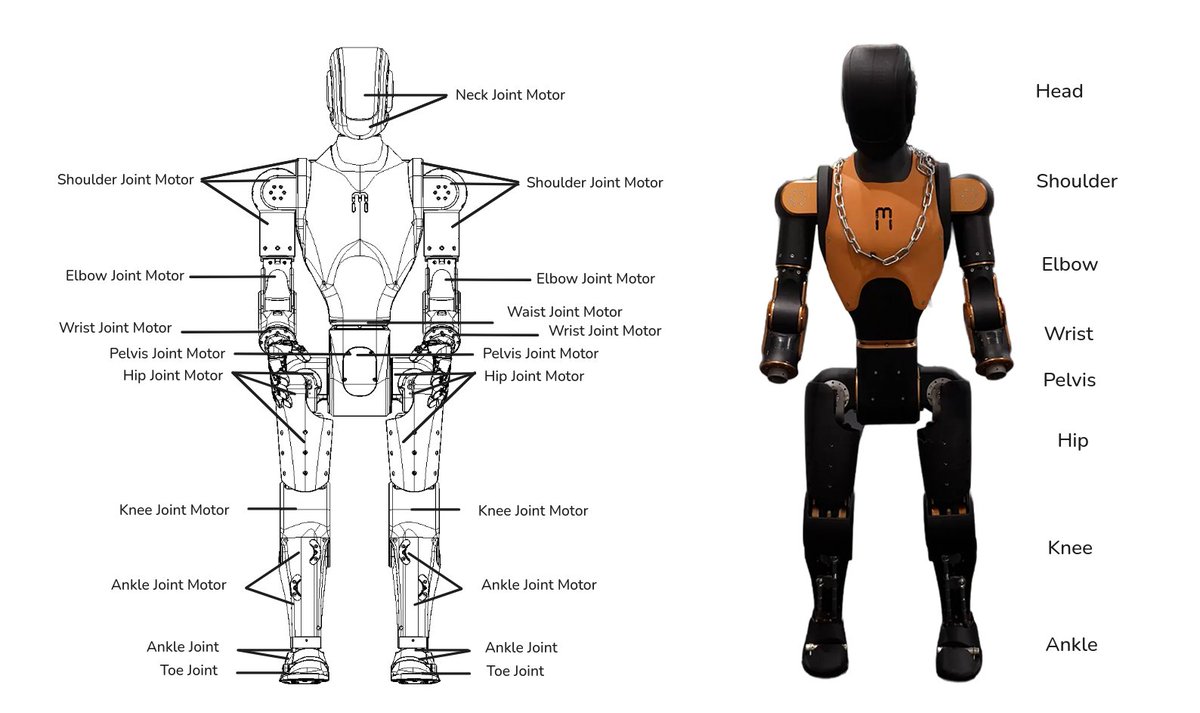
Ese paisaje ha cambiado algo. La web oficial sigue definiendo Asimov como un “open-source humanoid”, pero el manual técnico ya describe Asimov V1 como un robot de 1,2 metros, 35 kg, 25 actuadores en el cuerpo, una cabeza con sensores y computación integrada, y una pila orientada a teleoperación básica, captura de datos y locomoción preentrenada. Además, la página del BOM sitúa el coste de materiales de una unidad alrededor de los 22.000 dólares, con el objetivo de bajar hacia unos 15.000 dólares mediante volumen.
Eso desplaza el debate. Ya no se trata tanto de si el proyecto existe o no existe, sino de qué tipo de proyecto es realmente. Y la respuesta más honesta hoy parece ser esta: Asimov no compite todavía como un humanoide de producto listo para despliegue masivo, sino como una infraestructura abierta para experimentar con embodied AI y robótica humanoide sin depender de stacks completamente cerrados.
Lo más interesante no es el precio prometido, sino que quiera abrir el cuerpo entero
El detalle más relevante del nuevo anuncio no es solo el número de grados de libertad. Es la idea de abrir el cuerpo completo. En un sector donde muchas empresas intentan blindar hardware, datos y software como ventaja competitiva, publicar una plataforma integral puede ser más importante a medio plazo que otro vídeo de locomoción o una promesa agresiva de precio.
Porque el gran cuello de botella de la robótica humanoide no es únicamente fabricar robots que se muevan. También es crear una base suficientemente abierta para que más gente pueda iterar sobre ella: universidades, pequeños laboratorios, developers de control, investigadores en simulación, equipos de teleoperación o grupos que quieran entrenar políticas sobre hardware real.
Si Asimov logra que ese cuerpo completo sea realmente utilizable por terceros, su impacto puede ir bastante más allá del hype de un post en X. Puede convertirse en una especie de plataforma de referencia para quienes hoy se quedan fuera del juego por falta de acceso a hardware humanoide reproducible.
Pero sigue habiendo límites claros
Eso no significa que Asimov esté ya en la misma liga de madurez que otras compañías del sector. El propio manual deja claro que V1 no incluye manipulación avanzada, que no incorpora manos o grippers en el alcance actual y que su foco está en locomoción, teleoperación, sensórica y experimentación. Tampoco hablamos todavía de un sistema turnkey para usuario final.
Además, incluso con un BOM más accesible que el de muchas alternativas, el coste sigue lejos de la idea simplificada de “humanoide barato” que tanto gusta en redes. Un rango de 15.000 a 22.000 dólares no es masivo ni casual; sigue siendo una barrera relevante. Lo que cambia es que entra en una zona más plausible para investigación aplicada, laboratorios pequeños y builders avanzados.
Por eso la lectura útil no debería ser “Asimov ya ha resuelto el humanoide open source”. Más bien, Asimov está empezando a enseñar una arquitectura abierta de cuerpo completo con suficiente detalle como para que la promesa merezca seguimiento serio.
La prueba real será si aparece ecosistema
En hardware abierto, publicar archivos es solo el principio. La diferencia entre proyecto interesante y plataforma útil suele aparecer después, cuando toca sostener comunidad, documentación, repositorios, piezas, soporte y reproducibilidad. Ahí es donde Asimov se jugará de verdad su credibilidad.
Las señales que importarán en los próximos meses son bastante concretas: que la apertura del cuerpo completo llegue de verdad, que el manual siga madurando, que terceros puedan replicar partes del sistema sin depender del conocimiento tácito del equipo fundador y que el kit DIY no se quede solo en mensaje comercial. Si eso ocurre, Asimov puede ocupar un hueco muy poco servido hoy: el de una base humanoide abierta, relativamente accesible y técnicamente seria.
En ese sentido, la historia ha mejorado respecto a sus primeras apariciones. Ya no es solo un vídeo viral con promesas difíciles de verificar. Ahora hay más estructura, más detalle técnico y una dirección más clara. Sigue siendo un proyecto temprano, sí, pero uno que empieza a definir mejor por qué podría importar: no por vender el humanoide definitivo, sino por intentar liberar una capa de infraestructura que la robótica todavía tiene demasiado cerrada.
Fuentes
- Asimov en X — anuncio sobre la liberación del cuerpo completo de Asimov V1 [en]
- Science girl en X — vídeo sobre Asimov v1 y su enfoque open source [en]
- Asimov — web oficial del proyecto open-source humanoid [en]
- Asimov Manual — overview general del manual [en]
- Asimov Manual — overview de Asimov V1 con especificaciones técnicas [en]
- Asimov Manual — bill of materials de Asimov V1 [en]
- Asimov Manual — hoja de ruta de Asimov V2 [en]