Un equipo de EPFL ha desarrollado una mano robótica desmontable y reversible que rompe con una idea muy asumida en manipulación: que la mano del robot debe parecerse a la humana. Su prototipo puede incorporar hasta seis dedos idénticos, formar pinzas desde distintas combinaciones, invertir lo que entendemos como palma y dorso, y separarse del brazo para desplazarse por sí mismo hasta objetos fuera del alcance.
La investigación, publicada en Nature Communications, no busca hacer una prótesis bonita ni imitar cada rasgo anatómico de una mano humana. Hace justo lo contrario: parte de las limitaciones de nuestra mano —un solo pulgar, una orientación fija, dependencia completa del brazo— y pregunta qué pasaría si una mano robótica no tuviera que heredar esas restricciones.
El resultado parece extraño, pero tiene sentido para robótica industrial, de servicio y exploración. Si una herramienta final puede agarrar, recolocarse, alcanzar zonas estrechas y manipular varios objetos a la vez, el brazo que la transporta deja de ser el único responsable de todo el movimiento.
Dos pulgares, palma reversible y locomoción propia
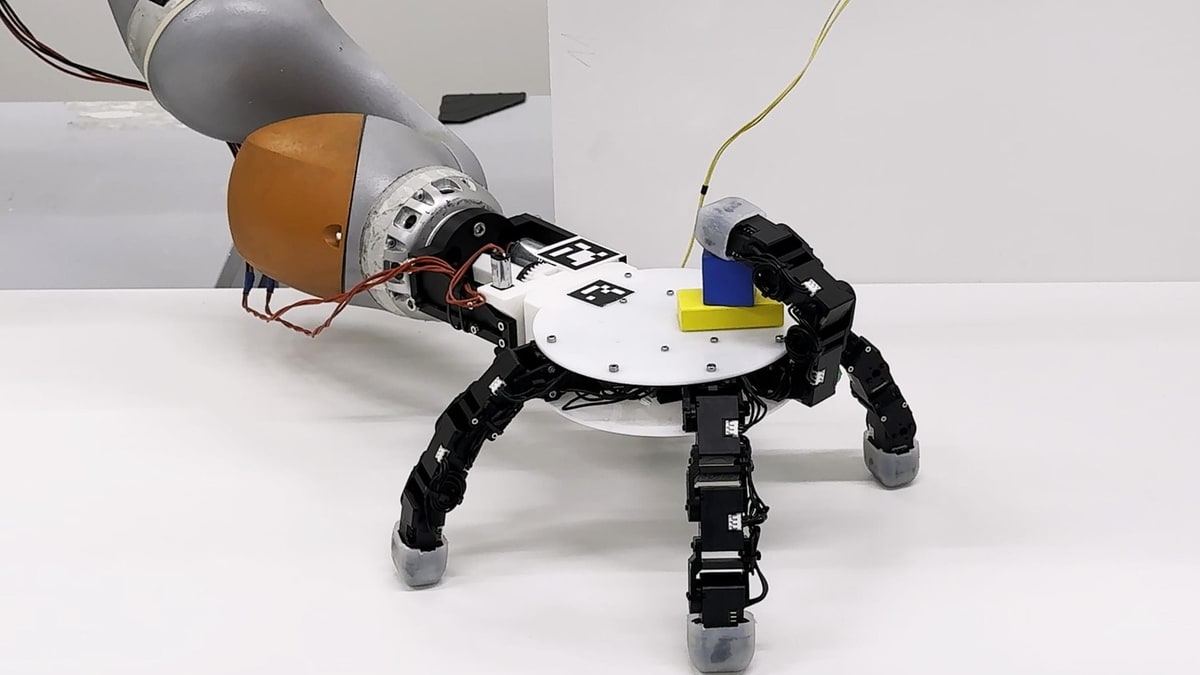
El diseño procede del laboratorio LASA y del Computational Robot Design and Fabrication Lab de EPFL. La mano usa dedos con puntas de silicona y una arquitectura simétrica que permite que distintas parejas funcionen como pulgares opuestos. En una configuración de seis dedos, los extremos pueden actuar como dos pulgares, uno a cada lado.
Esa simetría elimina una frontera clásica: la diferencia fija entre palma y dorso. Los dedos pueden plegarse en sentidos que permiten sujetar objetos por ambos lados o transportar piezas en posiciones que una mano humana no podría mantener sin cambiar por completo la postura del brazo.
La parte más llamativa es que la mano puede desprenderse del brazo y “caminar” sobre sus propios dedos. EPFL lo describe como loco-manipulación: combinar manipulación estacionaria con movilidad autónoma. No es movilidad para recorrer una fábrica entera, sino para ganar alcance local, entrar bajo muebles, rodear obstáculos o recuperar objetos desde zonas incómodas.
Una herramienta para espacios donde el brazo no llega bien
La robótica industrial suele resolver el alcance con brazos más grandes, raíles, ejes externos o células diseñadas a medida. Esa estrategia funciona, pero añade coste, espacio y complejidad. Una mano que se reposiciona por sí misma podría abrir una vía distinta para tareas de alta destreza en espacios confinados.
EPFL menciona usos en recuperación de objetos, entornos de servicio, exploración y brazos industriales tradicionales. También hay una lectura clara para cirugía robótica o mantenimiento: no siempre conviene mover todo el brazo cuando basta con que el efector final se adapte mejor al entorno.
El prototipo puede replicar muchos agarres humanos con cinco dedos, pero gana posibilidades cuando se aleja de la anatomía humana. Con más dedos, puede sujetar varios objetos, manipular herramientas o combinar agarre y desplazamiento. Esa modularidad es la parte más interesante: no diseñar una mano “universal” fija, sino una plataforma que se pueda adaptar a tareas concretas.
No todas las manos robóticas deberían parecer humanas
Durante años, buena parte de la robótica dextra ha medido su ambición contra la mano humana. Es comprensible: nuestra mano es versátil, compacta y enormemente precisa. Pero copiarla también arrastra sus límites. Una fábrica, un quirófano o una misión de exploración no necesitan necesariamente una mano humana artificial; necesitan una herramienta que resuelva mejor una tarea física.
La mano de EPFL encaja en esa tendencia más madura: menos antropomorfismo por defecto y más diseño funcional. Su aspecto puede resultar menos intuitivo, pero precisamente por eso abre capacidades que una mano humana no ofrece: dos pulgares, reversibilidad, movimiento independiente y agarre simultáneo desde varias orientaciones.
Todavía es investigación, no un producto industrial listo para montar mañana en una línea. Quedan preguntas sobre robustez, control, coste, mantenimiento y seguridad en entornos reales. Pero el enfoque es valioso porque recuerda algo básico: en robótica, imitar al cuerpo humano no siempre es la ruta más inteligente.
Si este tipo de diseño progresa, podríamos ver brazos robóticos menos dependientes de trayectorias perfectas y efectores finales más activos, capaces de negociar con el entorno en vez de esperar a que todo esté colocado exactamente donde conviene.