MIT ha presentado una técnica para fabricar estructuras microscópicas blandas que responden a campos magnéticos con mucha más precisión de lo habitual. El resultado son pequeños “magno-bots” capaces de deformarse, cerrarse como una pinza o comportarse como interruptores mecánicos cuando se acerca un imán externo.
La noticia no va de un robot médico listo para entrar en quirófano mañana. Va de algo más básico y quizá más importante: una forma de construir materia blanda, magnética y programable a escala microscópica sin sacrificar la geometría fina de la pieza. En robótica médica, microfluídica y materiales activos, esa combinación es una de las barreras que separan la demo bonita del dispositivo útil.
El equipo, con investigadores de MIT, EPFL y la Universidad de Cincinnati, publica el trabajo en Matter. Su enfoque evita mezclar directamente partículas magnéticas en la resina antes de imprimir, un método que suele dispersar la luz, deteriorar la impresión o dejar estructuras menos robustas.
La clave está en magnetizar después de imprimir
El proceso tiene dos pasos. Primero se imprime una microestructura de gel polimérico mediante litografía de dos fotones, una técnica capaz de generar formas 3D muy precisas. Después, esa estructura se sumerge en una solución con iones de hierro y más tarde en otra con iones hidróxido. La reacción forma nanopartículas de óxido de hierro dentro del gel ya impreso.
Ese orden importa. Al no meter las partículas metálicas desde el principio, los investigadores conservan la resolución de impresión. Y al ajustar la potencia del láser durante la fabricación, pueden controlar cuánto se entrecruza el gel en cada zona, lo que a su vez determina cuántas partículas magnéticas se forman después en cada parte de la estructura.
Dicho de forma sencilla: no todo el microrrobot responde igual al imán. Algunas zonas pueden moverse o deformarse más que otras. Esa distribución interna de magnetismo es lo que permite diseñar movimientos más ricos que el simple “tirar de una bolita metálica” hacia un campo externo.
Por qué esto interesa a la robótica médica
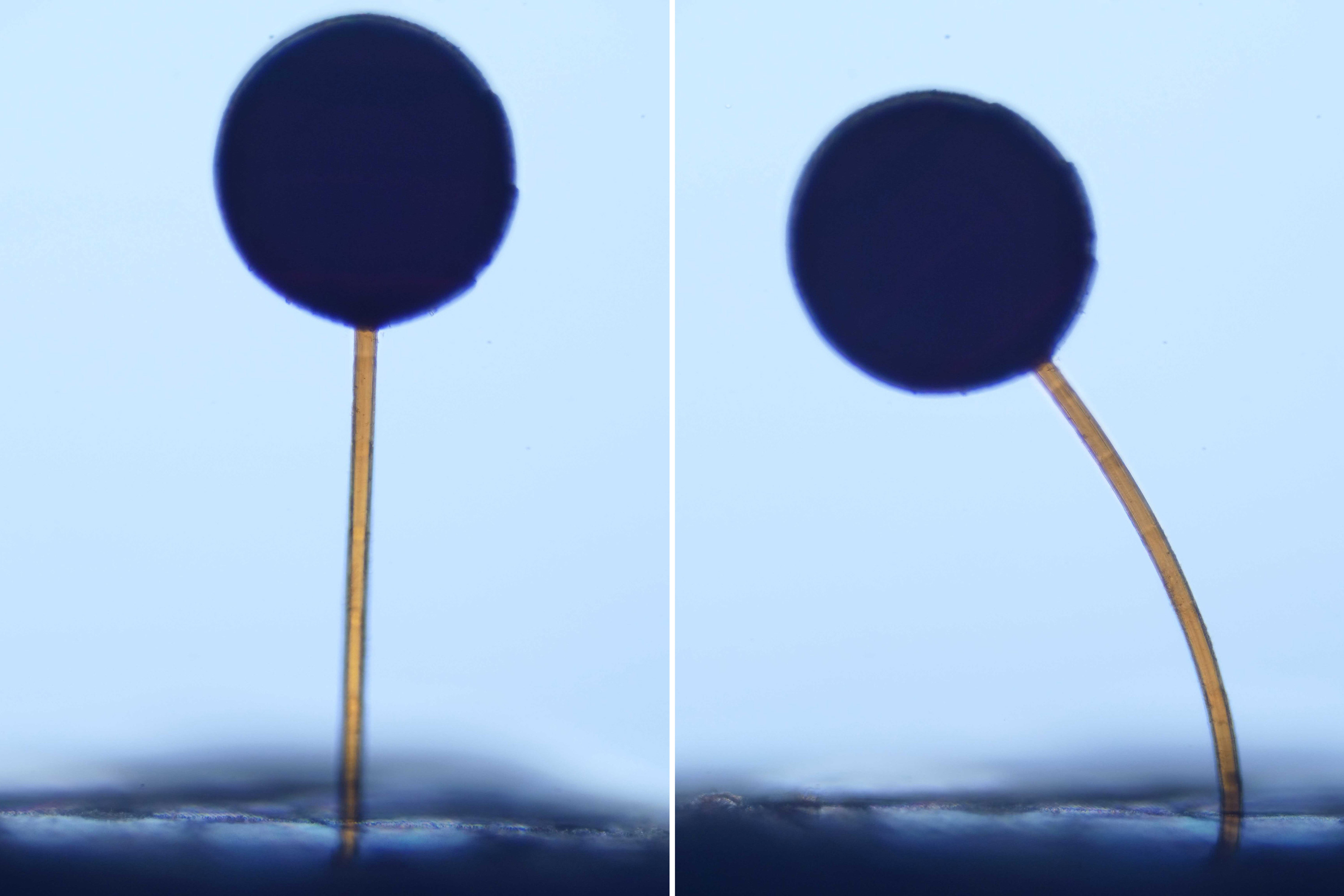
Una de las demostraciones del equipo es una estructura con forma de pequeños “chupa-chups” que, vista al microscopio, puede cerrar sus extremos como una pinza cuando se mueve un imán cercano. Otra es un interruptor bistable milimétrico con pequeñas palas magnéticas, capaz de alternar entre dos posiciones.
Las aplicaciones que menciona MIT son prudentes pero relevantes: microrrobots blandos que podrían liberar fármacos, tomar biopsias o actuar como válvulas en dispositivos microfluídicos. No es casualidad que la medicina aparezca tan rápido en la conversación. Dentro del cuerpo humano, la activación remota mediante imanes tiene una ventaja clara: permite mover o accionar estructuras sin cables, motores convencionales ni contacto directo.
Aun así, conviene no venderlo como una revolución clínica inmediata. Faltan pruebas de biocompatibilidad, control en entornos reales, navegación, seguridad y fabricación reproducible a escala. El avance está en la plataforma de fabricación, no en un producto sanitario acabado.
Un paso pequeño, pero en la dirección correcta
La robótica blanda lleva años prometiendo máquinas más seguras, adaptables y compatibles con tejidos vivos. El problema es que, cuanto más pequeña y compleja se vuelve una estructura, más difícil resulta integrar actuación, control y resistencia mecánica sin que una de las tres cosas falle.
La técnica de MIT es interesante porque ataca justo ese cuello de botella. Permite imprimir primero la forma fina y añadir después la funcionalidad magnética con cierto control espacial. Eso abre la puerta a microrrobots que no solo se desplacen, sino que ejecuten gestos internos: agarrar, abrir, cerrar, conmutar o deformarse de manera programada.
La lectura sensata es que estamos ante una pieza de infraestructura científica para futuros dispositivos, no ante un robot médico comercial. Pero esa pieza es valiosa: si los microrrobots blandos van a salir del laboratorio, necesitarán métodos de fabricación así de precisos, repetibles y compatibles con movimientos complejos.