Asimov v1 ya no es solo una promesa en redes ni una página de especificaciones suelta. El proyecto impulsado por Menlo Research ha publicado un repositorio abierto con archivos mecánicos, diseño eléctrico, modelo de simulación y software de a bordo para construir, simular y modificar un humanoide bípedo. La noticia importa menos por el titular de “robot open source” que por algo más concreto: empieza a haber material verificable para que terceros evalúen si la plataforma puede reproducirse fuera del equipo que la creó.
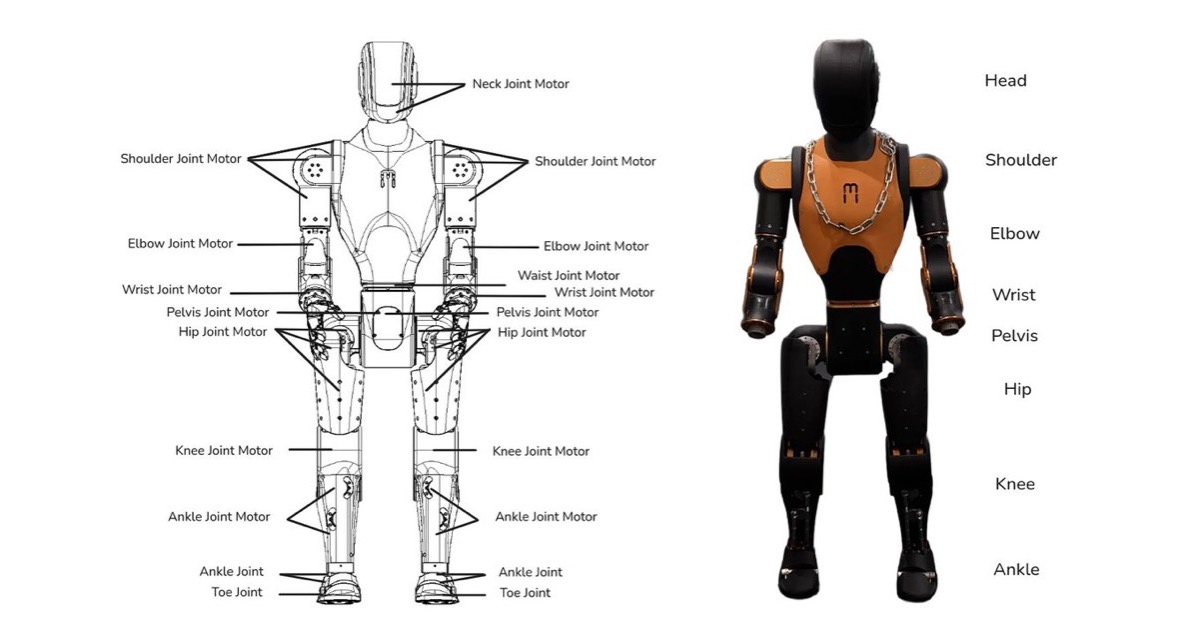
El repositorio oficial describe Asimov v1 como un robot de 1,2 metros, 35 kg y 25 grados de libertad actuados, más dos articulaciones pasivas en los dedos de los pies. No es una cifra espectacular frente a humanoides industriales más grandes, pero encaja con el objetivo declarado: una plataforma de referencia para builders, investigadores y equipos que quieran trabajar con hardware humanoide sin depender de una caja negra cerrada.
Qué se ha abierto exactamente
La parte relevante está en el alcance. Según el repositorio de GitHub, Asimov v1 incluye CAD mecánico, CAD eléctrico, modelo de simulación y software embarcado. También hay una licencia de hardware CERN-OHL-S-2.0 y licencia de software GPL-2.0, una combinación coherente con la ambición de permitir modificación y redistribución bajo reglas abiertas.
El manual oficial aterriza mejor la propuesta. Asimov se presenta como un humanoide de referencia, disponible como kit DIY o como construcción autoabastecida a partir de la lista de materiales. La guía deja claro que el objetivo no es vender un robot doméstico acabado, sino ofrecer una base de trabajo: documentación de montaje, arquitectura de cómputo, sensores, seguridad básica y una ruta para que otros puedan construir o adaptar el sistema.
Ese matiz es importante. En robótica, “open source” puede significar muchas cosas: desde publicar un diagrama casi decorativo hasta liberar una base realmente replicable. Asimov se acerca más a lo segundo porque no se limita a enseñar renders. Publica piezas, estructura de repositorio, manifiesto de fabricación y enlaces a manual y BOM. La prueba real será si esa documentación resiste cuando la usen equipos externos sin apoyo directo del equipo fundador.
Un humanoide pequeño, modular y con límites declarados
La ficha técnica ayuda a poner los pies en el suelo. Asimov v1 tiene seis grados de libertad por pierna, cinco por brazo, un eje de cintura y dos ejes de cuello. En cómputo, combina una Raspberry Pi 5 para media y red con una Radxa CM5 para control de movimiento. En sensores, el manual menciona cámara monocular, IMU, micrófonos, altavoz y estados articulares de motor, pero deja fuera elementos más caros como LiDAR o cámaras de 360 grados.
También hay límites explícitos, y eso juega a favor de la credibilidad del proyecto. El manual señala que quedan fuera la manipulación avanzada, las manos o pinzas y el entrenamiento a bordo. La plataforma apunta a teleoperación básica, recogida de datos, locomoción preentrenada, gemelo digital y experimentación con agentes mediante API. Es decir: Asimov v1 no pretende competir hoy con un humanoide industrial listo para trabajar turnos en fábrica.
El kit DIY añade otra capa comercial. El repositorio habla de un depósito de 499 dólares, un precio objetivo de 15.000 dólares y envíos previstos para verano de 2026. Son cifras agresivas, pero no conviene leerlas como precio final de un producto maduro. En hardware temprano, el coste real suele aparecer en herramientas, piezas de recambio, tolerancias de fabricación, montaje, soporte, baterías, seguridad y tiempo técnico.
Por qué puede importar aunque no esté listo para despliegues
La robótica humanoide avanza en dos direcciones a la vez. Por un lado están las empresas que intentan cerrar hardware, datos y software para capturar valor en despliegues industriales. Por otro, aparece una necesidad creciente de plataformas accesibles para investigación aplicada, pruebas de control, simulación y aprendizaje físico. Asimov v1 intenta ocupar ese segundo espacio.
Ahí puede tener sentido incluso si nunca se convierte en un producto masivo. Un humanoide abierto, suficientemente documentado y fabricable con componentes razonables, puede acelerar trabajo en laboratorios pequeños, universidades, comunidades maker avanzadas y equipos de software que hoy no pueden permitirse una plataforma cerrada de alto coste. No sustituye a un robot industrial, pero puede bajar la barrera para experimentar con cuerpo completo.
La comparación útil no es con Atlas, Optimus o Figure, sino con otros proyectos abiertos que han servido como base de aprendizaje aunque no dominaran el mercado. Si Asimov consigue que terceros lo monten, lo rompan, lo modifiquen y publiquen mejoras, su valor estará en el ecosistema, no solo en la unidad física.
La pregunta ahora es la reproducibilidad
Publicar archivos es el primer paso. Convertirlos en una plataforma fiable es otra historia. Harán falta manuales que no dependan de conocimiento tácito, proveedores estables, piezas que encajen con tolerancias razonables, simulación que no se separe demasiado del robot real y una comunidad capaz de aportar correcciones sin quedar bloqueada por detalles de fabricación.
Por eso la noticia merece atención, pero no euforia. Asimov v1 no demuestra que el humanoide open source esté resuelto. Sí demuestra que el proyecto ha cruzado una frontera importante: de la promesa a un repositorio auditable. En un sector lleno de vídeos difíciles de verificar, eso ya es una señal valiosa.