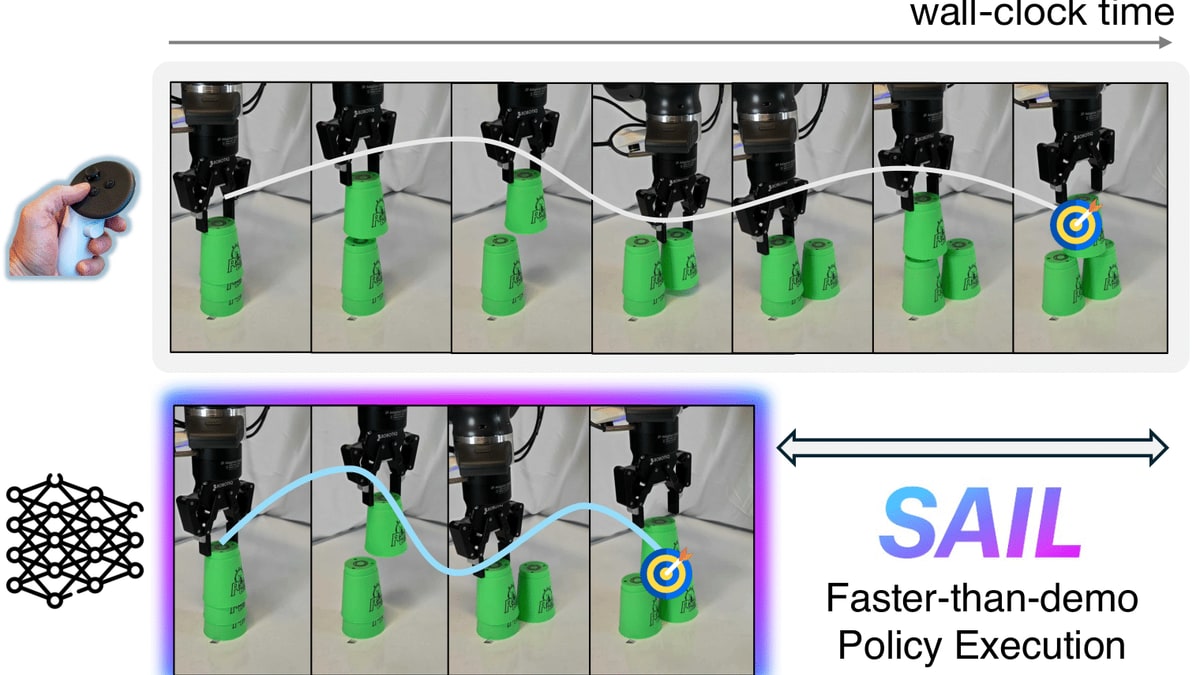
Investigadores de Georgia Tech han presentado SAIL (Speed Adaptation for Imitation Learning), un sistema diseñado para que los robots que aprenden por imitación no queden atrapados en la velocidad de la demostración humana. En pruebas con brazos robóticos, SAIL logró ejecutar tareas reales hasta 3,2 veces más rápido que la demostración original sin perder precisión en la mayoría de casos.
El avance apunta a un cuello de botella muy concreto. El aprendizaje por imitación permite enseñar a un robot mostrando una tarea: apilar vasos, doblar tela, colocar fruta, empaquetar comida o limpiar una superficie. Es una vía atractiva porque evita programar cada movimiento a mano. Pero tiene una limitación evidente: si el robot copia demasiado literalmente, también copia el ritmo humano.
Para una demo de laboratorio eso puede ser aceptable. Para industria, logística, restauración o asistencia, no. Una máquina que solo trabaja a la velocidad de quien la enseñó puede quedarse corta en productividad, aunque técnicamente sepa hacer la tarea.
El problema no es solo acelerar
Aumentar la velocidad de un robot no consiste en pulsar un botón de “x2”. Cuando un brazo se mueve más rápido, aparecen errores de seguimiento, latencias de cámara e inferencia, cambios en el contacto con objetos y fallos por pequeñas variaciones del entorno. Una trayectoria que funciona despacio puede volverse torpe o peligrosa al acelerarla.
SAIL aborda ese problema como una pila completa. El sistema genera acciones más consistentes en el tiempo, programa comandos teniendo en cuenta retrasos de percepción e inferencia, usa control de alta fidelidad para seguir la trayectoria y modula la velocidad según la complejidad de cada tramo. Dicho de forma simple: no intenta ir rápido siempre, sino saber dónde puede acelerar y dónde conviene frenar.
Georgia Tech probó el enfoque en tareas simuladas y reales. En el mundo físico, los robots trabajaron con acciones como apilar objetos, limpiar una pizarra, colocar alimentos o manipular recipientes. El resultado más interesante no es solo el pico de velocidad, sino que el sistema conserva una parte importante de la fiabilidad cuando sale del ritmo de entrenamiento.
Por qué importa para robots de propósito general
El aprendizaje por imitación se ha convertido en una de las piezas clave de la robótica moderna porque permite capturar habilidades humanas sin escribir reglas para cada caso. Pero si esas políticas aprendidas no son suficientemente rápidas, su valor comercial se reduce.
SAIL no convierte un brazo robótico en un trabajador universal. El propio equipo reconoce límites: la interacción dinámica con objetos sigue siendo difícil, los grippers pueden imponer restricciones físicas y algunas tareas requieren reducir velocidad para mantener contacto o precisión. El ejemplo de limpiar una pizarra es revelador: si el soporte se mueve o vibra, ir más rápido puede empeorar el resultado.
Aun así, el trabajo es relevante porque ataca una diferencia práctica entre “sabe hacerlo” y “puede hacerlo a ritmo útil”. En fábricas, cocinas industriales, centros logísticos o entornos sanitarios, la velocidad no es un lujo. Es parte de la viabilidad económica del robot.
Menos magia, más ingeniería de sistemas
La robótica de propósito general suele venderse con vídeos espectaculares y promesas enormes. SAIL va por otro camino: identifica un problema técnico muy específico y lo divide en piezas manejables. Latencia, suavidad de trayectoria, control, velocidad adaptativa y hardware no son detalles secundarios; son lo que separa una política aprendida de una herramienta desplegable.
También deja una lectura incómoda para la industria. Si los robots aprenden de humanos pero luego tienen que superar su ritmo, la automatización no se limitará a replicar trabajos actuales. Reorganizará procesos alrededor de lo que la máquina puede hacer más rápido, más constante o durante más horas.
El avance de Georgia Tech no resuelve la generalización completa, pero sí empuja el aprendizaje por imitación hacia usos más realistas. En robótica, muchas veces el salto importante no es enseñar una nueva habilidad, sino hacer que esa habilidad sobreviva al mundo físico con la velocidad suficiente para que alguien quiera pagar por ella.
Fuentes
- Georgia Tech — Smarter, Faster, and More Human: A Leap Toward General-Purpose Robots [en]
- SAIL project page — Faster-than-Demonstration Execution of Imitation Learning Policies [en]
- arXiv — SAIL: Faster-than-Demonstration Execution of Imitation Learning Policies [en]
- New Atlas — SAIL tech lets robots perform human-scale tasks far more quickly [en]