Categoría
IA en robótica
La capa de software que da inteligencia a los robots: visión artificial, modelos de control, aprendizaje automático y autonomía en entornos reales.

Orbbec lleva visión 3D con IA al robot industrial
Orbbec muestra en Automate 2026 filtros de profundidad, cámaras Gemini y demos para carretillas y cobots que buscan cerrar puntos ciegos de percepción.

DexRobot lleva manos hábiles y DexTele a Automate 2026
DexRobot muestra en Automate 2026 su serie DexHand y DexTele, un sistema de teleoperación para capturar datos táctiles, visión y postura en robots.
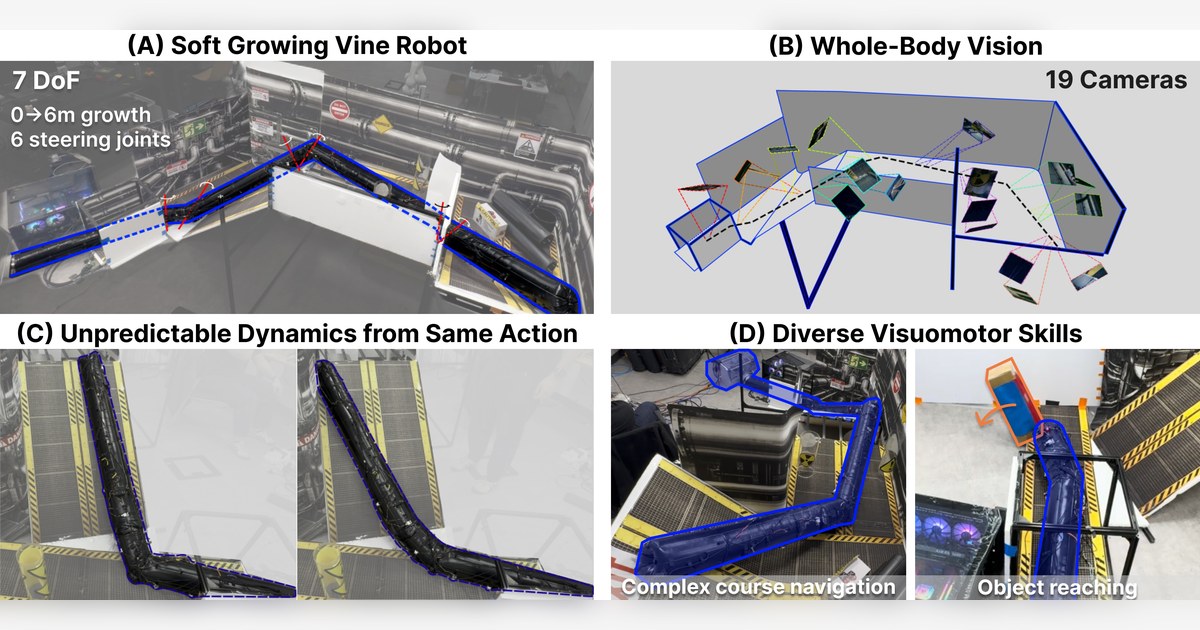
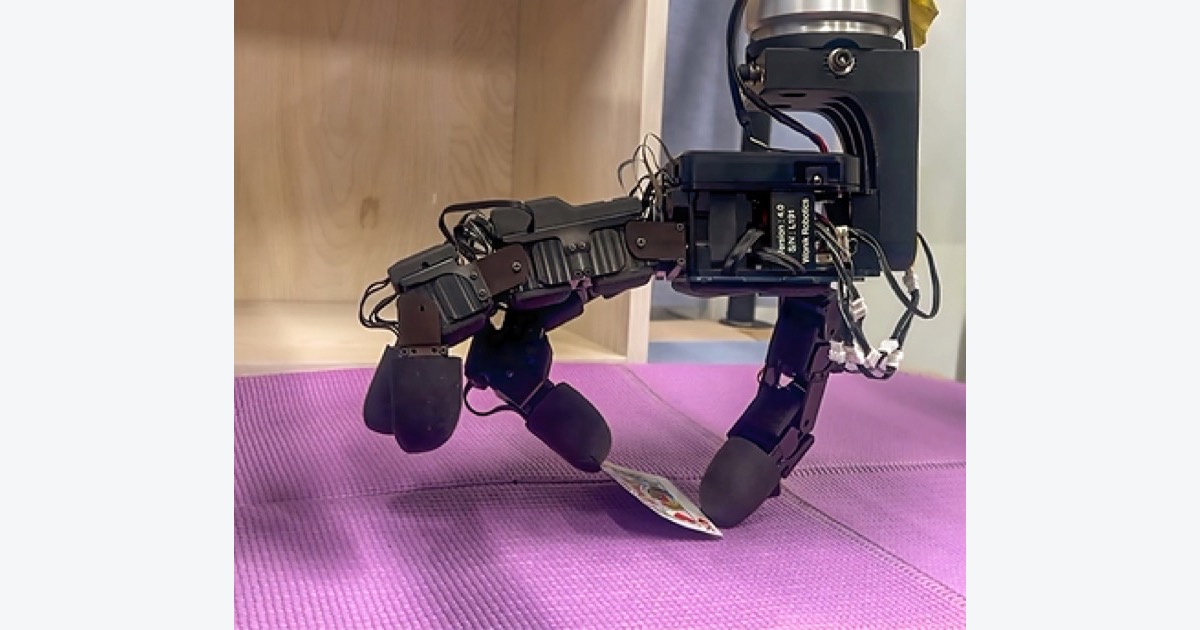
PanoVine da visión de cuerpo entero a un robot blando
Stanford presenta PanoVine, un robot blando de seis metros con 19 cámaras para navegar, girar y alcanzar objetos con control visuomotor.
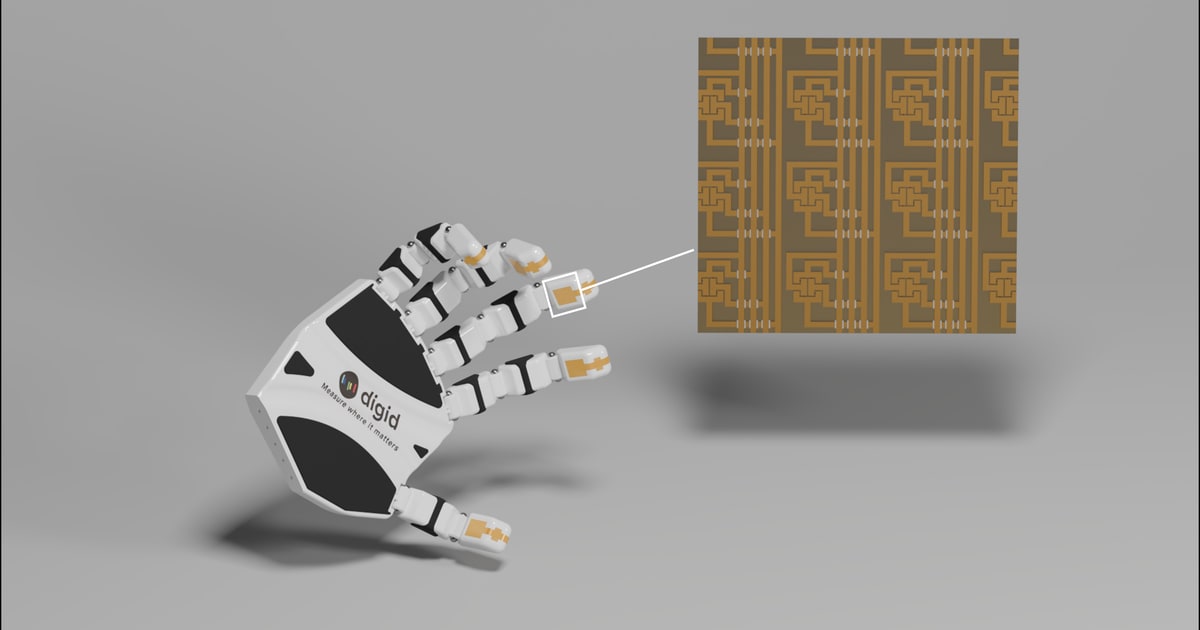
Digid acerca nanosensores de 5 micras a la piel robótica
Digid propone sensores de fuerza de 5 micras para manos y piel robótica, con matrices densas que llevan el tacto físico al borde.

Intrinsic enseña una célula modular para IA física
Intrinsic muestra en Automate 2026 una célula robótica modular con IntrinsicOS, Flowstate y una demo FANUC para fabricación adaptable.

NVIDIA lleva Halos a la seguridad de robots con IA física
NVIDIA presenta Halos for Robotics, una pila de seguridad para robots con IA física que Agility probará en Digit para fábricas y almacenes.

Olo Robotics quiere quitar fricción a programar robots
La startup británica Olo Robotics lanza una plataforma web sobre ROS 2 para simular, programar y desplegar aplicaciones robóticas con menos configuración.
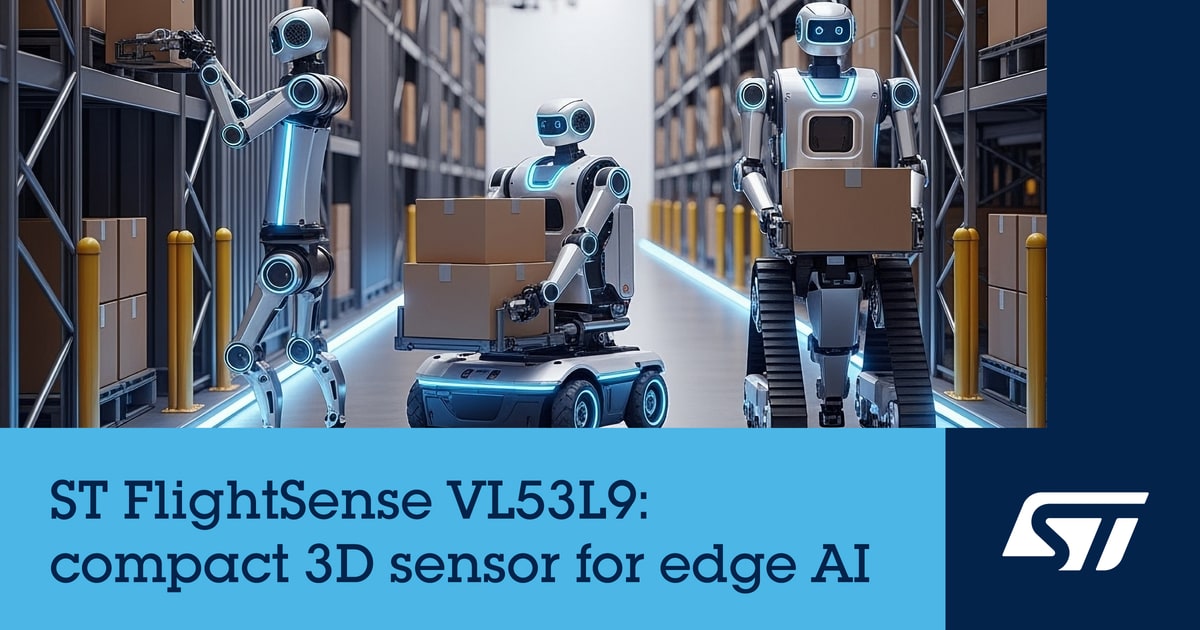
ST encoge el LiDAR 3D para robots con edge AI
STMicroelectronics lanza VL53L9CX, un módulo LiDAR 3D dToF de 2.268 zonas para dar percepción compacta a robots, automatización y edge AI.

NEURA lleva Neuraverse y sus robots cognitivos a Automate
NEURA Robotics mostrará en Automate 2026 su cartera de robots cognitivos, Neuraverse y NEURA Gyms para entrenar IA física industrial.

Built y xLAB entrenan IA física en obras solares
Built Robotics y xLAB probarán modelos de IA física en obras solares reales, con foco en seguridad, detección de personas y datos de campo.

RealSense presenta D585 Pro como visión nativa para robots
RealSense lanza D585 Pro y Perception Studio en Automate 2026, con cámara de profundidad, SoC Gen 5 y software para percepción robótica en campo.

Sanctuary AI lleva su IA física a una línea de cables
Sanctuary AI valida una tarea de inserción de cables con 99,5% de éxito y ciclos de 2,54 segundos en una línea industrial real.

Festo convierte el agarre mixto en software con GripperAI
Festo presenta GripperAI, un software local con cámara 3D que calcula puntos de agarre y reduce la programación en manipulación mixta.

Kawasaki estrena RL030N, un robot de 8 ejes para IA física
Kawasaki Robotics presentará en Automate 2026 el RL030N, una plataforma de ocho ejes para aplicaciones industriales de IA física y control en tiempo real.

ABB y PSYONIC enseñan a los robots a tocar mejor
ABB Robotics y PSYONIC combinan el cobot GoFa con Ability Hand para usar datos de manos protésicas en agarre robótico industrial.

Agile Robots lleva su IA física industrial a RTJ 2026
Agile Robots muestra en RTJ 2026 robots con control de fuerza, Diana 7, Thor, Franka y Agile ONE para tareas industriales con contacto real.

Genesis AI presenta Eno, un robot generalista con ruedas
Genesis AI enseña Eno, un robot móvil con brazos y manos diestras que empezará por logística, fábricas y laboratorios antes de mirar al hogar.

Teradyne lleva la IA física de UR y MiR a Automate
Teradyne Robotics mostrará en Automate 2026 aplicaciones comprables de IA física sobre cobots UR, AMR MiR y socios industriales en fabricación.
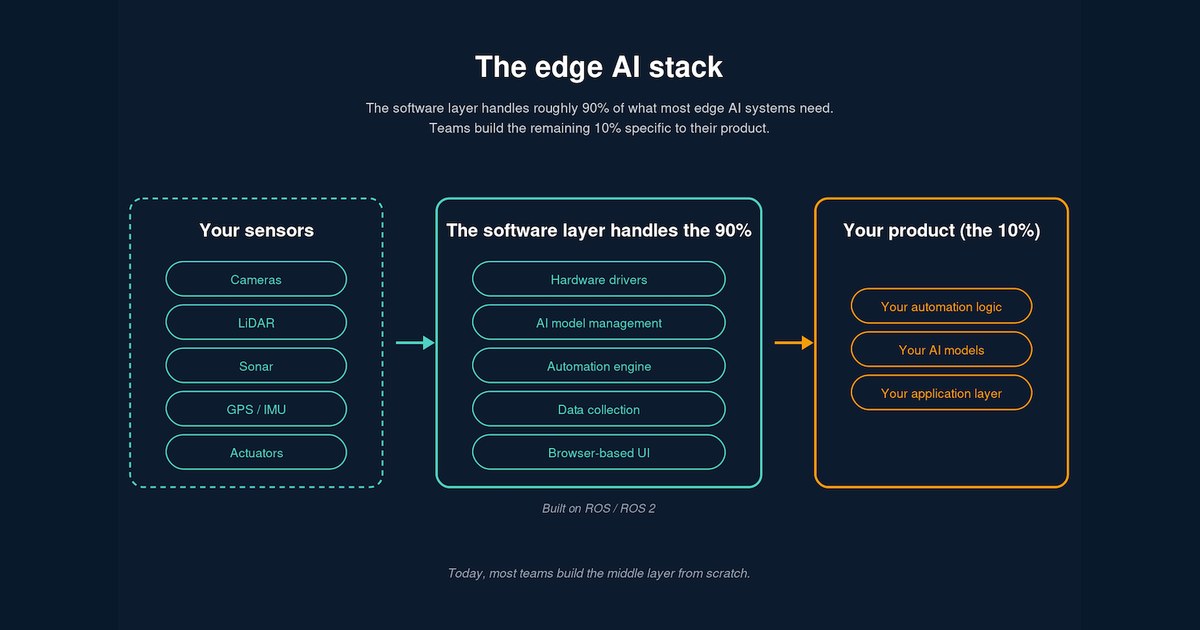
Numurus quiere quitar fricción al edge AI en robots
Numurus empuja NEPI como una capa de software para conectar sensores, modelos de IA y automatización en robots sin rehacer toda la infraestructura.

Doosan conecta sus cobots al stack de IA física de NVIDIA
Doosan y NVIDIA amplían su colaboración para llevar Isaac, Cosmos y Jetson Thor a cobots industriales, depaletizado, lijado y nuevos formatos robóticos.

LEOTEK convierte el semáforo en un nodo de IA física
LEOTEK mostró en ITS America 2026 su plataforma Interlux, un semáforo inteligente con radar, visión, edge computing y analítica en tiempo real.
NVIDIA pone un cerebro multiagente en la fábrica
NVIDIA presenta FOX, un blueprint para coordinar agentes industriales, robots y datos de planta con IA física y gemelos operativos en tiempo real.
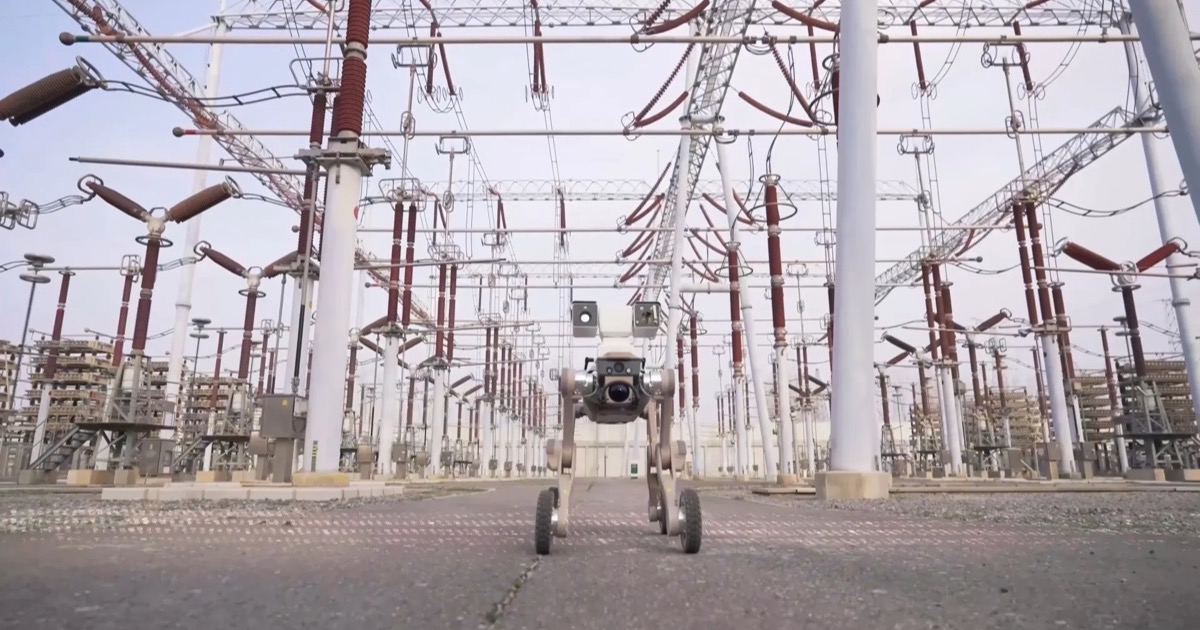
GENISOM lleva sus cuadrúpedos M1 y L1 a ICRA
GENISOM AI presenta en ICRA sus M1 y L1, cuadrúpedos industriales con 30 kg de carga, IP67 y una pila de percepción para inspección y emergencia.

Nomagic lleva VLA a turnos autónomos en Brack.Alltron
Nomagic amplía su despliegue con Brack.Alltron para usar modelos VLA en picking y packing con turnos autónomos de noche y domingo.

Visual Components 5.1 simula fábricas con AMR sin atajos
Visual Components 5.1 mejora navegación AMR, física y validación con controladores reales para probar fábricas grandes antes de comprar hardware.

Instawork lanza Instacore para entrenar robots en el mundo real
El sistema wearable de cinco cámaras captura tareas en cocinas, almacenes y hoteles para alimentar modelos de IA física con datos reales.

Mech-Mind llevará visión 3D e IA física a Automate
Mech-Mind mostrará en Automate 2026 nuevas cámaras 3D y estaciones robotizadas para picking, depaletizado y manipulación industrial con IA.
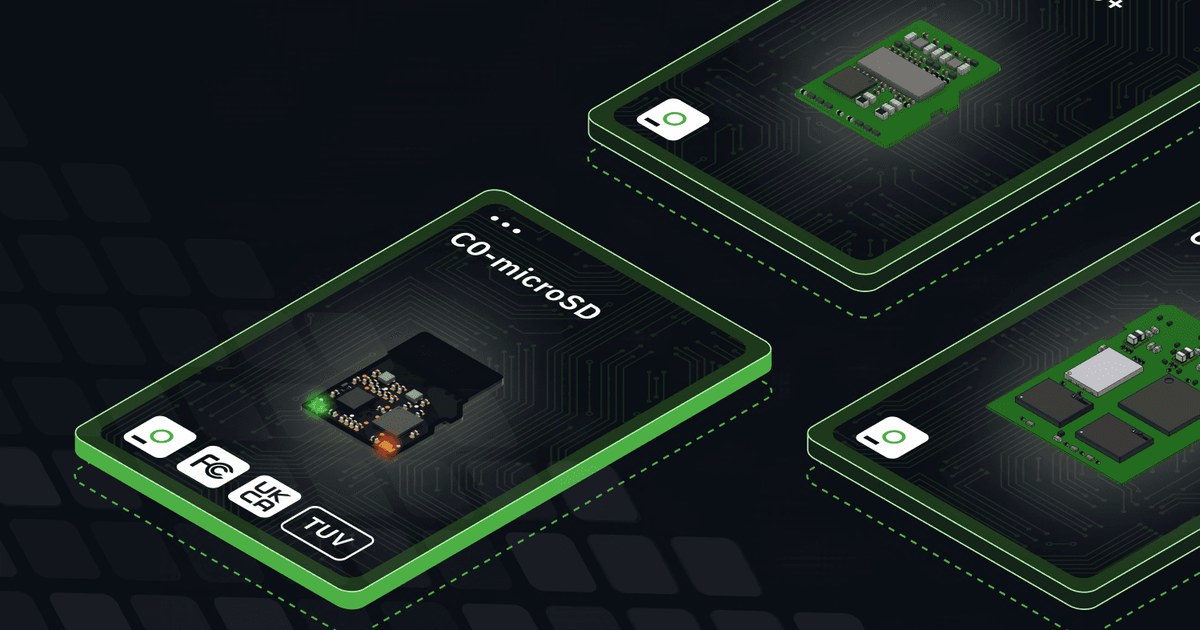
Signaloid lleva su C0-ASIC para IA física a Bosch Connected World
Signaloid mostrará en Berlín su C0-ASIC para robótica, un chip que busca acelerar filtros, fusión sensorial y cálculo probabilístico.
XELA añade uñas sensorizadas a sus dedos uSkin
XELA Robotics llevará a Automate 2026 una punta robótica con uña de seis ejes para manipular tarjetas, llaves y objetos frágiles.
morph convierte la robótica blanda en celdas programables
La startup londinense morph sale de stealth con una plataforma de celdas robóticas blandas para integrar IA física en productos adaptativos.
RobOmni mide el tacto robótico con tareas de contacto real
Daimon Robotics y Galbot presentan RobOmni en ICRA 2026, un benchmark para evaluar manipulación con visión, tacto y validación sim-to-real.

Hellbender lleva cámaras de IA física al borde del robot
Hellbender abre en junio los pedidos de tres cámaras de IA en el borde para robots, con 12,5 millones de dólares y pilotos en utilities y retail.
Inbolt programa robots desde CAD para líneas en movimiento
Inbolt lanza Robot Programming y amplía Robot Control a Yaskawa para cerrar el salto entre gemelo digital, visión 3D y movimiento real en fábrica.

AGIBOT lleva su World Challenge de la simulación al robot real
AGIBOT cierra en ICRA 2026 una competición con 526 equipos y finales sobre robots G2 reales para medir IA física más allá del benchmark clásico.

Flexiv enseña en ICRA un brazo con tacto de cuerpo completo
Flexiv adelanta en ICRA 2026 su nueva cartera robótica, con el brazo Enlight y una plataforma modular de doble brazo antes de su lanzamiento comercial.

ArgosVision lleva ArgosVue a Singapur para ampliar la visión robótica
ArgosVision mostrará en Echelon Singapore 2026 su sensor ArgosVue, una cámara 3D panorámica pensada para navegación, seguridad e imitación robótica.

Infineon blinda Jetson Thor con un TPM para robots
Infineon integra su OPTIGA TPM SLB 9672 en NVIDIA Jetson Thor para añadir raíz de confianza, verificación de software y seguridad poscuántica a robots físicos.

NVIDIA convierte la IA física en tareas para agentes
NVIDIA publica herramientas y skills abiertos para que agentes automaticen flujos de simulación, datos y despliegue en robótica y visión industrial.
TARS lleva DexHand y AWE 3.0 a la manipulación fina en ICRA
TARS presenta en ICRA 2026 DexHand, una mano diestra de 21 grados de libertad, y demos de AWE 3.0 con embalaje, cableado flexible y tacto fino.
Xense lleva el tacto robótico a ICRA con TacCap-Gripper
Xense Robotics presenta en ICRA 2026 TacCap-Gripper y una demo VTLA bimanual para convertir contacto, fuerza y deslizamiento en datos útiles.

Changingtek lanza Uhand para dar tacto a los robots
Changingtek lanza Uhand, una mano de captura táctil para entrenar robots con datos de fuerza, pose, visión y contacto sincronizados en entornos reales.

Qualcomm convierte Dragonwing IQ10 en una base completa para robots
El nuevo Dragonwing IQ10 RRD junta computo, sensores, red y software para acelerar robots industriales, AMR y humanoides desde Computex 2026.

X Square abre WALL-WM: robots que aprenden por eventos
X Square Robot publica WALL-WM, un modelo de mundo que organiza vídeo, lenguaje y acción alrededor de eventos físicos ejecutables.

X Square abre Wall-OSS-0.5 para probar VLA en robots reales
X Square Robot publica Wall-OSS-0.5, un modelo VLA de 4B que promete comportamiento zero-shot medible en robots físicos.
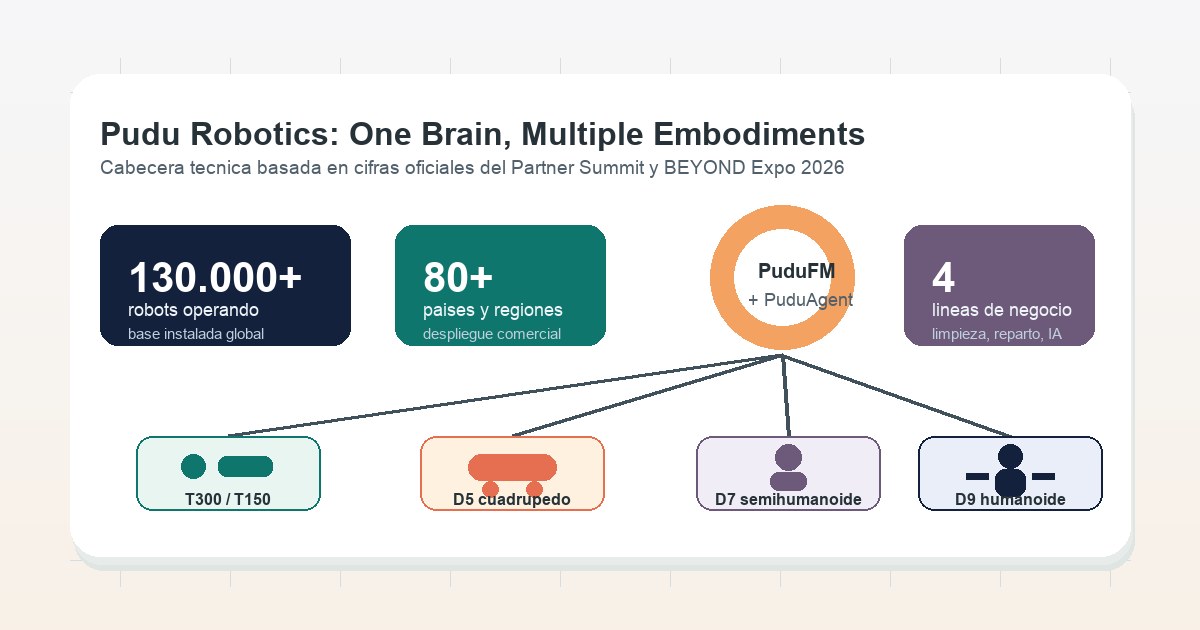
Pudu usa 130.000 robots como palanca para la IA física
Pudu Robotics presenta en BEYOND Expo su estrategia de IA física: 130.000 robots desplegados, PuduFM y una arquitectura para varios cuerpos.

NVIDIA abre GR00T N1.6 y Cosmos para acelerar la IA física
NVIDIA libera nuevos modelos Cosmos y GR00T N1.6, integra Isaac con LeRobot y refuerza Jetson Thor como base de inferencia para robots humanoides.
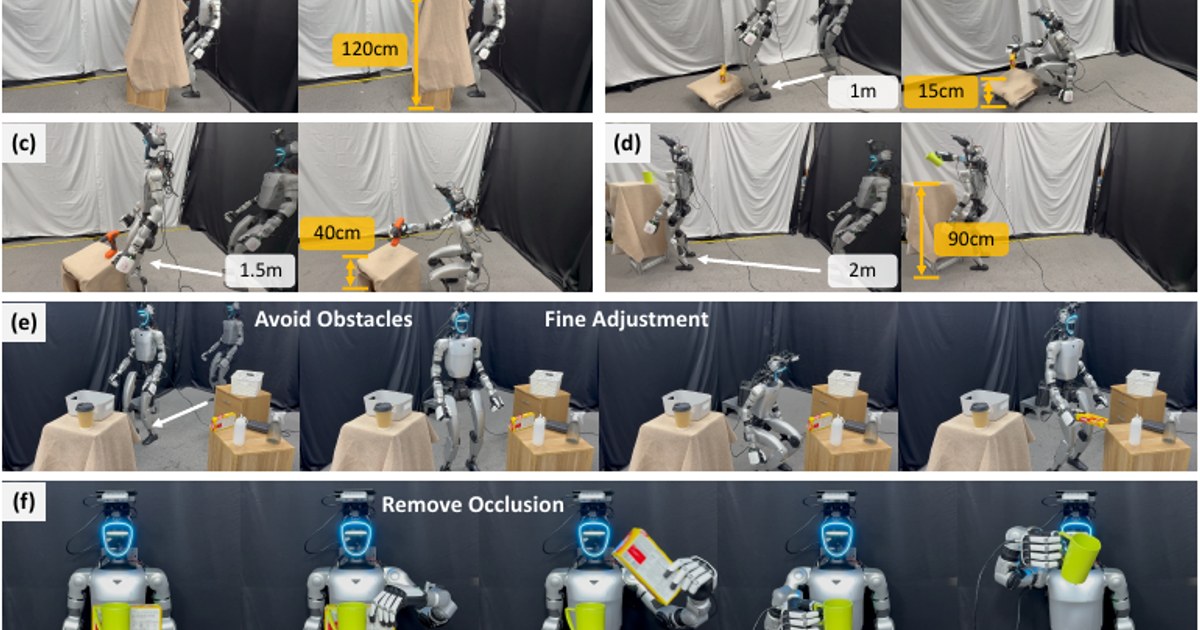
Active Spatial Brain apunta a humanoides que manipulan en 3D
Un paper en arXiv propone dividir la manipulación de cuerpo completo en percepción espacial activa y generación de acciones generalizables.

SAE WCX pone seguridad y gobierno en el centro de la IA física
Un white paper de SAE WCX 2026 desplaza la conversación sobre IA física desde la demo hacia seguridad, confianza y despliegue real.

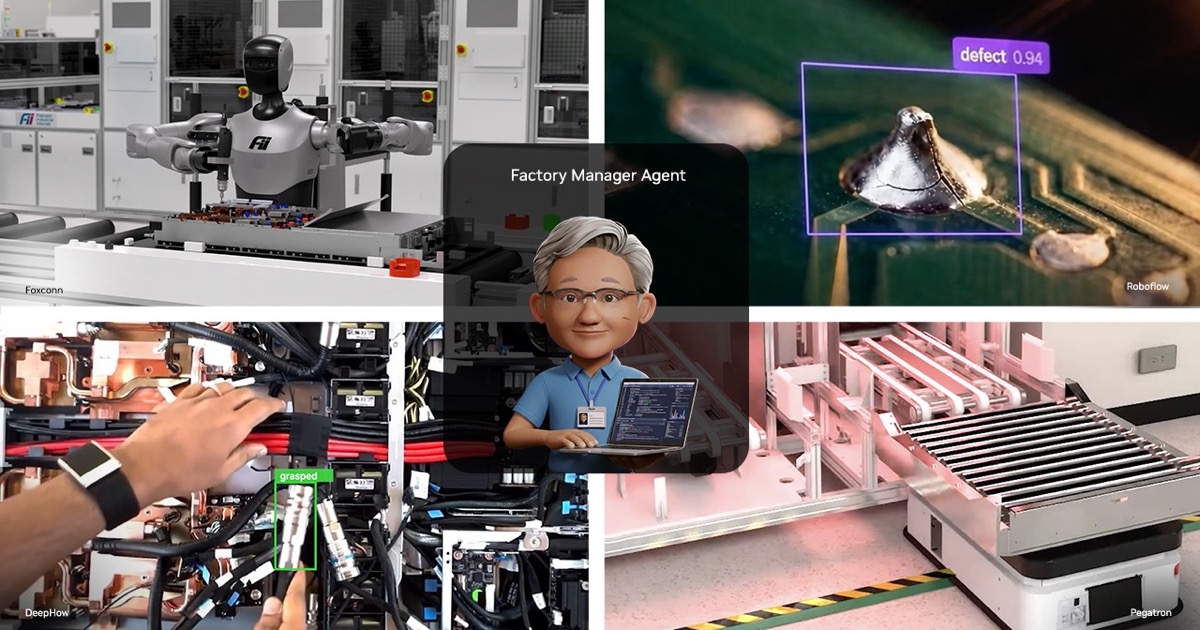
FANUC conecta Gemini con sus robots: la IA física baja a la célula industrial
FANUC y Google llevan Gemini, Intrinsic y Flowstate a robots industriales, con más de 1.000 unidades ya enviadas para aplicaciones de IA física.

Google conecta Genie con Street View: simuladores de calles reales para entrenar robots y agentes
DeepMind integra Street View en Genie para crear entornos interactivos basados en lugares reales, con potencial para robótica y conducción autónoma.

X-Humanoid presenta Wise KaiWu Agent: memoria espacial para que los robots no vivan solo del último frame
Wise KaiWu Agent combina memoria espacial dinámica, perfiles de usuario y control táctil para llevar los agentes de IA al trabajo físico con robots reales.

DEEPX y Ultralytics llevan YOLO al edge: un atajo para poner visión artificial dentro de robots reales
DEEPX se integra con Ultralytics para que los modelos YOLO puedan desplegarse en NPUs de bajo consumo con formato deepx y menos fricción técnica.

RLWRLD presenta RLDX-1: un modelo fundacional centrado en la destreza de las manos robóticas
RLDX-1 apunta al cuello de botella de los humanoides: manipular, verter y usar herramientas con contacto físico real, no solo moverse o conversar.

ShengShu presenta Motubrain: un modelo de acción mundial para entrenar robots más allá de tareas aisladas
Motubrain combina vídeo, lenguaje y acción en un único modelo para que los robots aprendan secuencias completas y generalicen entre cuerpos distintos.
Ai2 libera MolmoAct 2: un modelo abierto para que los robots manipulen mejor fuera del laboratorio
MolmoAct 2 combina razonamiento 3D, datos bimanuales abiertos y control más rápido para tareas robóticas reales como laboratorio, mesa y manipulación.

inSystem Gravity Sorter: IA en caída libre para sacar baterías de la basura
inSystem.io presenta Gravity Sorter, un sistema de clasificación con IA que detecta baterías en residuos municipales en caída libre y promete hasta 50 piezas por segundo.

PAL Robotics llevará a ICRA 2026 un nuevo robot de manipulación: menos demo pasiva y más interacción real
PAL Robotics presentará en ICRA 2026 una nueva plataforma de manipulación y demos interactivas con TIAGo Pro y Kangaroo.

Genesis AI presenta GENE-26.5: una mano robótica y un modelo para atacar el problema difícil de la manipulación
Genesis AI muestra GENE-26.5, un sistema de IA, mano diestra y datos humanos para tareas largas como cocinar, pipetear o cablear.
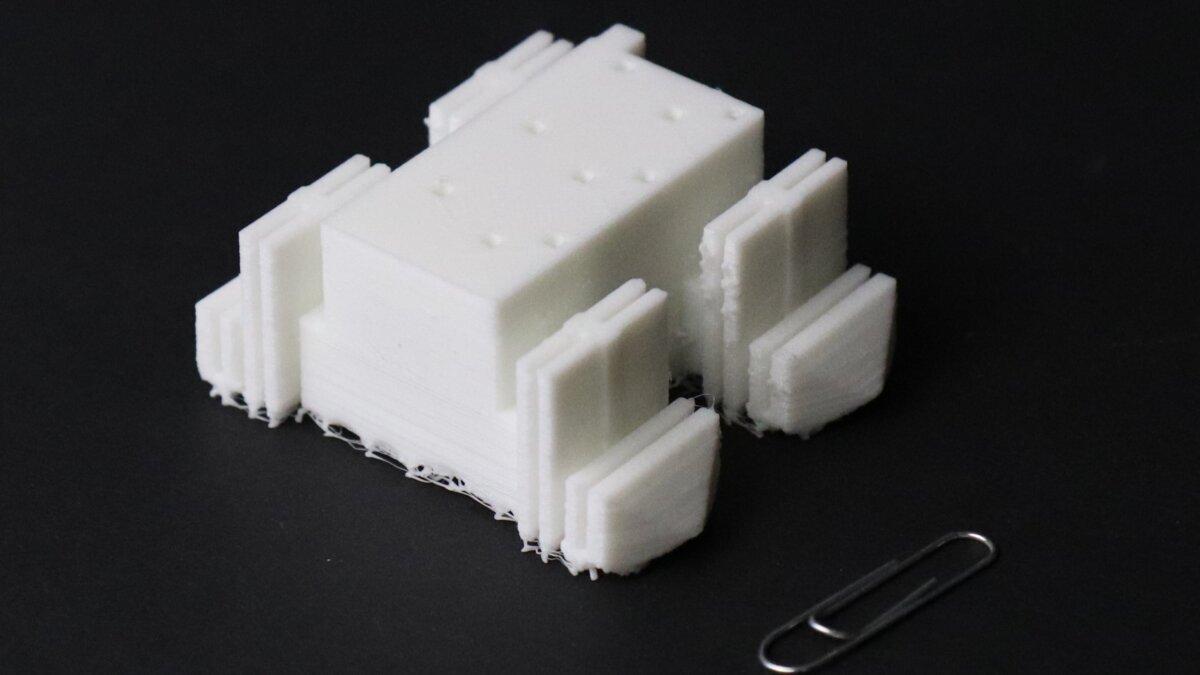
La Universidad de Edimburgo imprime robots blandos que salen andando de una máquina de 400 libras
Edimburgo presenta Flex Printer, una impresora 3D abierta y barata capaz de fabricar robots blandos neumáticos en una sola pieza.
ATEC2026 quiere ser un test de Turing para robots: del simulador al mundo real sin red
ATEC2026 evaluará locomoción, manipulación y adaptación en robots con brazos fuera del laboratorio, con fases en Pittsburgh, Shanghái y Hong Kong.
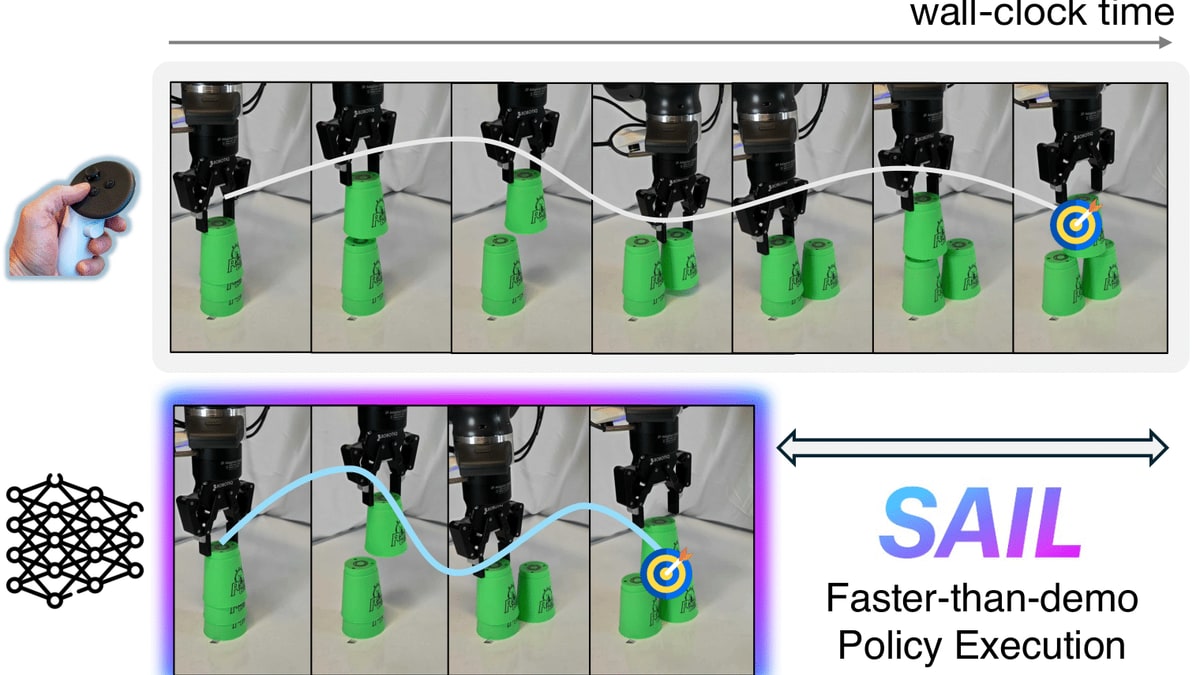
Georgia Tech acelera el aprendizaje por imitación: SAIL permite a robots trabajar hasta 3,2 veces más rápido
SAIL, de Georgia Tech, rompe el límite de velocidad de las demostraciones humanas en robots que aprenden tareas por imitación.

TUM enseña a un robot a buscar objetos perdidos usando lenguaje, mapas y sentido común espacial
La Universidad Técnica de Múnich presenta un robot que combina visión, mapas 3D y modelos de lenguaje para localizar objetos de forma más eficiente.

Zoomlion enseña Robot Ops en Hannover: una plataforma para llevar la IA física a la fábrica
Robot Ops combina datos, software y agentes para entrenar, orquestar y desplegar robots industriales y humanoides en escenarios reales.

Sony AI publica Ace en Nature: un robot que ya compite con jugadores de élite al tenis de mesa
Ace combina visión de alta velocidad, aprendizaje por refuerzo y hardware preciso para competir contra jugadores expertos de tenis de mesa.

Agibot presenta A3, G2 Air y D2 Max: la robótica china empieza a enseñar cartera, no solo demos
La nueva tanda de robots y modelos de Agibot combina humanoides, manipuladores móviles, cuadrúpedos y una pila de IA física orientada a despliegue.

Gemini Robotics-ER 1.6 hace menos ruido y más trabajo: razonamiento espacial, lectura de instrumentos y detección de éxito
Google DeepMind sube la precisión de su modelo para robots con mejor comprensión espacial, multivista y lectura de instrumentación de campo.

Chef Robotics supera 100 millones de raciones y deja una lección incómoda para la IA física: sin datos reales no hay robot útil
Chef Robotics asegura haber completado 100 millones de raciones en plantas de clientes, una escala que convierte la manipulación de alimentos en uno de los bancos de datos más duros de la IA física.
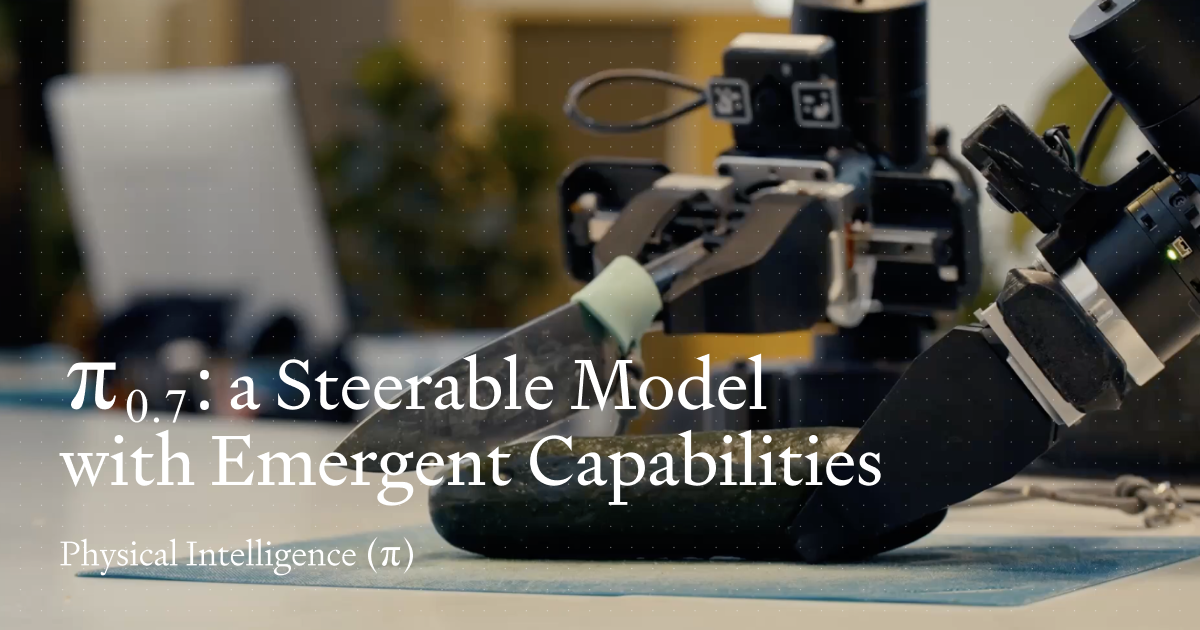
Physical Intelligence enseña con π0.7 que la generalización útil en robots quizá llegue antes por lenguaje que por magia
La startup Physical Intelligence presenta π0.7, un modelo que combina instrucciones, contexto y subobjetivos visuales para ejecutar tareas no vistas en entrenamiento. La señal fuerte es la recombinación de habilidades, no la demo suelta.

Spot ya sigue órdenes en lenguaje natural con Gemini Robotics, pero la lección importante va por el SDK
Boston Dynamics muestra a Spot recogiendo objetos con Gemini Robotics-ER 1.5. Lo llamativo es la demo doméstica, pero lo serio es cómo el modelo usa herramientas sobre la API del robot sin reescribir toda la lógica.
Jetson Thor ya está disponible y NVIDIA baja la IA física de gran promesa a hardware comprable
NVIDIA pone en disponibilidad general Jetson AGX Thor y sus módulos de producción. La clave no es solo la potencia, sino que por fin hay una base comprable para robots con razonamiento en tiempo real.
Newton 1.0 de NVIDIA ya está listo para producción y apunta justo al cuello de botella de la robótica física
Newton 1.0 sale en disponibilidad general con simulación GPU para manipulación y locomoción. La clave no es solo correr más rápido, sino acercar mejor el entrenamiento al mundo real.
Xiaomi rediseña la mano de CyberOne para que la manipulación humanoide se acerque un poco más a la fábrica real
La nueva mano biónica de CyberOne reduce tamaño, gana sensibilidad táctil y mejora su resistencia. El movimiento importa porque la utilidad de muchos humanoides se juega justo en la mano.

NEURA y Qualcomm quieren estandarizar el ‘cerebro y sistema nervioso’ de la robótica física
NEURA Robotics y Qualcomm anuncian una alianza para combinar procesadores Dragonwing con la plataforma Neuraverse y acelerar robots cognitivos listos para producción.
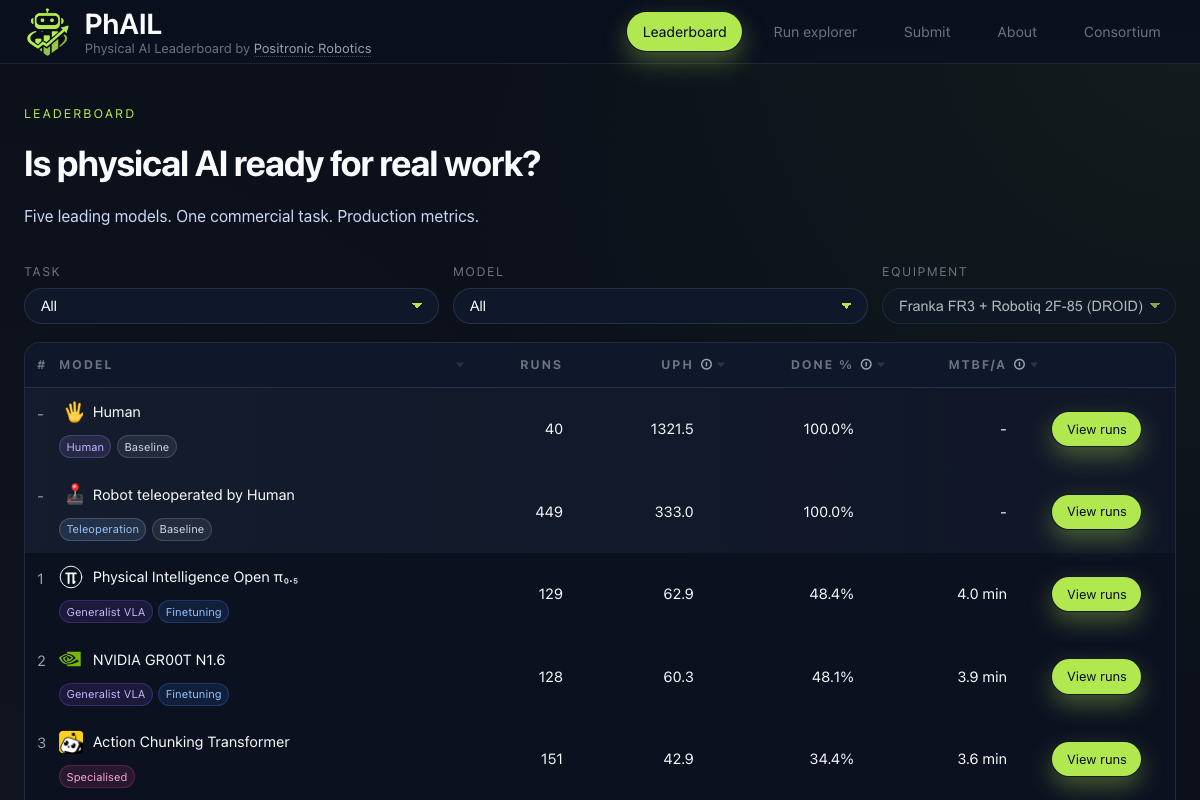
PhAIL pone cifras al problema de la IA física: los mejores modelos aún están lejos de la producción
Positronic Robotics lanza PhAIL, un benchmark sobre hardware real que mide velocidad y fiabilidad de modelos VLA. Los resultados enfrían el hype de la IA física.

Boston Dynamics y el RAI Institute quieren que Atlas aprenda habilidades nuevas con refuerzo y menos fragilidad
Boston Dynamics y el RAI Institute trabajan en una tubería compartida de aprendizaje por refuerzo para Atlas. Qué buscan mejorar y por qué importa más de lo que parece.
USC quiere que los robots con dedos de verdad aprendan mantenimiento naval en tiempo real, y ahí sí puede haber un salto útil
Un proyecto financiado por la Office of Naval Research busca que robots con manos multifinger aprendan tareas de precisión con feedback humano multimodal para operar mejor en entornos reales.
BrainOS Clean 2.0 quiere que los robots de limpieza dejen de depender de rutas rígidas y empiecen a adaptarse al entorno real
Brain Corp actualiza su plataforma con BrainOS Clean 2.0 y SelfPath AI para llevar la limpieza autónoma hacia una autonomía más adaptable y menos basada en rutas fijas.

PickNik aprieta MoveIt Pro 9.0 con más percepción conectada al movimiento y mejor teleoperación, justo donde la robótica útil se gana el sueldo
MoveIt Pro 9.0 refuerza la conexión entre percepción, movimiento y teleoperación, una combinación clave para llevar robots más allá de demos bonitas y hacia operaciones repetibles.

MindOn convierte el Unitree G1 en una prueba incómoda para el resto del sector: el valor puede estar más en el cerebro que en el cuerpo
La startup china MindOne muestra un Unitree G1 realizando tareas domésticas sin teleoperación aparente. La demo no prueba producto listo para casa, pero sí refuerza la tesis de que el cuello de botella está en el software.

Nyro, el semihumanoide de 34 grados de libertad que un desarrollador japonés está construyendo casi en solitario
El proyecto Nyro de Ryota Kobayashi muestra por qué la robótica real sigue dependiendo de integración, control y hardware bien resuelto: base móvil, elevación, doble brazo y 34 grados de libertad en una sola plataforma.
Unitree abre UnifoLM-WBT-Dataset: más que otro modelo, un atajo para entrenar humanoides con datos reales
Unitree ha liberado UnifoLM-WBT-Dataset, un conjunto de datos de teleoperación de cuerpo completo para humanoides en entornos abiertos. La jugada importa porque convierte datos físicos escasos en infraestructura reutilizable.
Agile Robots se alía con Google DeepMind para llevar Gemini Robotics a fábricas, automoción y centros de datos
Agile Robots integrará los modelos Gemini Robotics de Google DeepMind en su plataforma industrial para desplegar robots más adaptables en fabricación, logística y centros de datos.

Boston Dynamics y FieldAI quieren que Spot trabaje en obras cambiantes sin mapas previos
La alianza combina Spot con modelos de base orientados al mundo físico para inspeccionar obras y zonas dinámicas con más autonomía y menos dependencia de rutas fijas.

NEURA y la Universidad Técnica de Múnich lanzan un RoboGym para escalar la IA física en Europa
NEURA Robotics y TUM invertirán unos 17 millones en un centro de 2.300 m² para entrenar flotas de robots humanoides y generar datos reales para IA física.
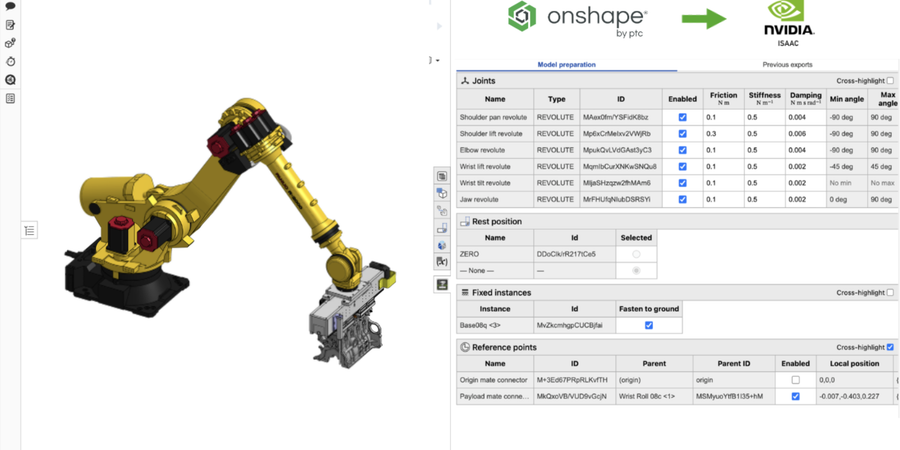
PTC conecta Onshape con NVIDIA Isaac Sim para acelerar el paso de CAD a simulación robótica
PTC presenta en el GTC 2026 un flujo que conecta Onshape con NVIDIA Isaac Sim para reducir fricción entre diseño mecánico, simulación física y entrenamiento de robots.
TI se alía con NVIDIA para llevar la robótica del laboratorio al hardware real: control, sensórica y seguridad en cada articulación
La alianza entre Texas Instruments y NVIDIA apunta al cuello de botella menos glamuroso de la robótica: convertir la IA física en máquinas desplegables, seguras y repetibles a nivel de junta y actuador.

Universal Robots y Scale AI presentan UR AI Trainer: así quieren llevar el aprendizaje por imitación de la demo a la fábrica
Universal Robots lanza junto a Scale AI un sistema para capturar datos multimodales y entrenar modelos de robótica sobre hardware listo para producción.
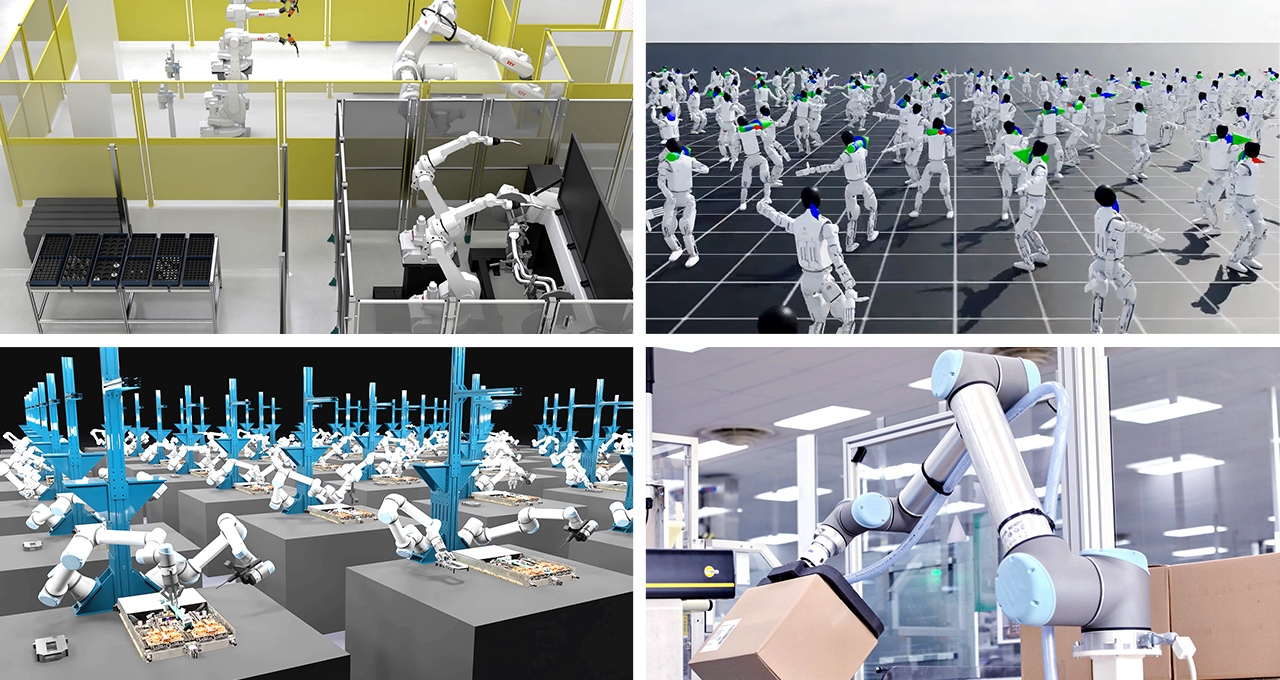
IA y robótica: cuando la inteligencia artificial toma forma física
La convergencia entre IA generativa y robótica está dando lugar a máquinas que perciben, razonan y actúan. Así avanza esta nueva etapa tecnológica.