Un equipo de la Luleå University of Technology ha probado en una mina activa un dron conectado por 5G cuyo controlador de alto nivel no corre a bordo, sino en un clúster edge cercano. La clave no es solo volar bajo tierra: es cerrar el bucle de control en un entorno industrial real, con latencias medidas y hardware limitado en el robot.
Un controlador fuera del dron
El trabajo, publicado en arXiv el 3 de junio de 2026, presenta lo que sus autores describen como el primer vuelo autónomo real de un robot aéreo conectado por 5G y controlado mediante un controlador descargado al edge. El sistema combina un dron cuadricóptero, una red 5G NR Standalone, un clúster Kubernetes situado en la instalación y un controlador predictivo no lineal, o NMPC, encargado de generar las acciones de control.
La arquitectura importa porque ataca una fricción clásica de la robótica móvil: cuanto más sofisticado es el control, más cómputo necesita el robot, y ese cómputo pesa, consume energía y complica el mantenimiento. En un dron, esa tensión es especialmente dura. Cada gramo añadido reduce autonomía o margen de carga útil. Sacar parte de la inteligencia hacia infraestructura cercana permite imaginar plataformas más ligeras, siempre que la comunicación sea lo bastante rápida y estable.
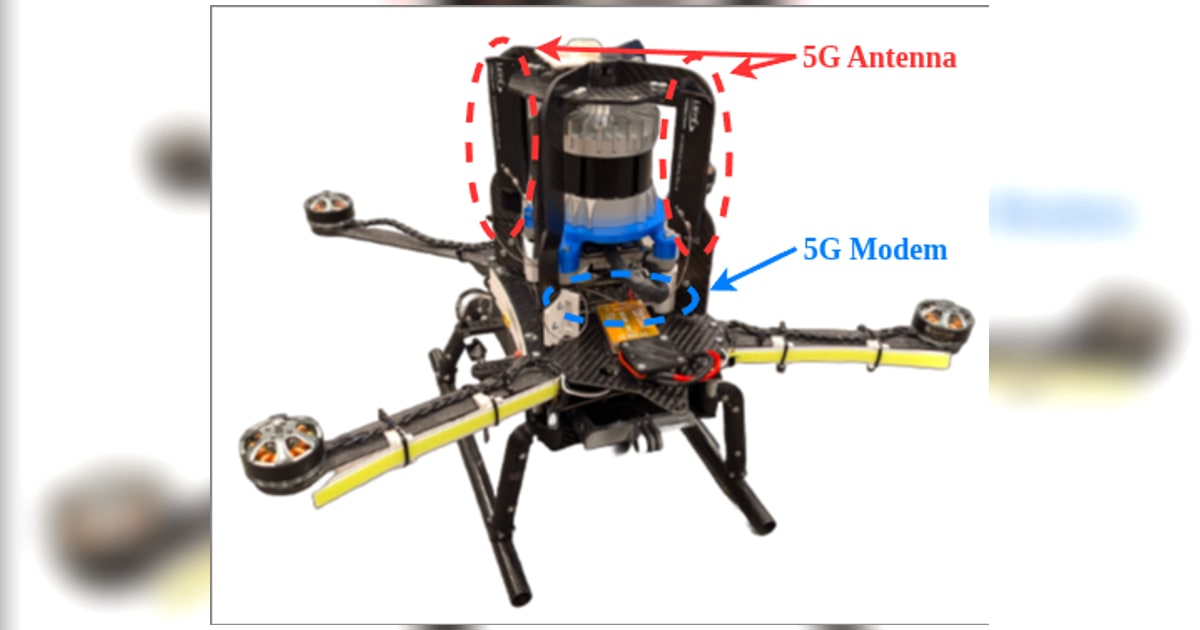
El robot usado en el ensayo no es un dron comercial sin modificar. Según el paper, monta un ordenador Intel NUC con Ubuntu 20.04 y ROS 1, un LiDAR Ouster para posicionamiento y evitación de colisiones, un módem Sierra Wireless EM9293 y cuatro antenas distribuidas a 90 grados para mejorar la cobertura espacial. El operador humano selecciona puntos de paso; el controlador en el edge recibe el estado del robot y devuelve órdenes de roll, pitch, yaw rate y empuje.
La mina como prueba de estrés
El escenario elegido es relevante. Muchas demostraciones de 5G y edge robotics se quedan en laboratorio, con cobertura controlada, geometría amable y pocas interferencias operativas. Aquí el ensayo se realiza en una mina subterránea activa del norte de Suecia, un entorno mucho más incómodo para radio, navegación y seguridad. Los autores insisten precisamente en esa diferencia: querían validar la arquitectura fuera de un banco académico.
La instalación de red se apoya en estaciones base de Ericsson adaptadas a las condiciones de la mina. Para el exterior se usa una configuración macro multisección en la banda n78, a 3,5 GHz, mientras que dentro de los túneles se emplean estaciones con configuración de dos sectores y antenas directivas para cubrir mejor la longitud de las galerías. La red trabaja con 100 MHz de ancho de banda y con slices separados: uno optimizado para baja latencia en el testbed y otro para usos menos críticos.
El edge tampoco es un portátil improvisado junto al túnel. El paper describe un clúster Kubernetes con cuatro nodos activos, CPU Intel multinúcleo, 590 GiB de RAM, GPU NVIDIA GTX 2080 Ti y Rancher Kubernetes Engine con Kubernetes 1.28.15. El controlador NMPC se despliega como una aplicación contenerizada, con servicios NodePort para la comunicación UDP bidireccional entre el dron y el clúster.
Esa elección técnica tiene una lectura práctica. Si el control de robots industriales empieza a depender de infraestructura local, las fábricas, minas o puertos no solo comprarán robots: comprarán también arquitectura de red, edge computing, monitorización de latencia y operación de software. La robótica se parece cada vez más a un sistema distribuido.
Latencia medida, no promesa
La parte más útil del estudio está en las medidas. El equipo evaluó retardo y jitter de extremo a extremo con Qosium, colocando una sonda en el servidor edge y otra en el ordenador del dron. El retardo máximo de subida fue de 5 a 34 ms, y el de bajada de 3 a 27 ms. Al corregir la deriva de reloj, el retardo de subida quedó entre 4 y 13 ms, con una media de 9,5 ms, mientras que la bajada se movió entre 2 y 15 ms, con media de 6,5 ms.
Para un lector no especializado, esas cifras pueden parecer pequeñas sin contexto. Lo importante es que el sistema de control necesita recibir estado, calcular la acción y devolver comandos sin romper estabilidad. Según los autores, esos valores mantienen el bucle dentro de un régimen estable para la arquitectura propuesta. También midieron jitter de 0 a 5 ms en subida y de 0 a 11 ms en bajada, con tráfico medio de 2,1 Mbps en uplink y 0,1 Mbps en downlink.
El matiz es que no se transmiten nubes de puntos completas por la red. La localización se estima a bordo para evitar enviar datos pesados del LiDAR; por 5G viajan telemetría y comandos. Eso hace el sistema más realista, pero también delimita la conclusión. El experimento no demuestra que todo el procesamiento de percepción de un dron pueda salir del robot sin coste. Demuestra algo más concreto: que el control de alto nivel puede descargarse al edge en una mina real si la arquitectura de red y cómputo está diseñada para ello.
Qué significa para la robótica industrial
La minería es un buen laboratorio para esta idea porque combina riesgo humano, mala accesibilidad y necesidad de inspección frecuente. Un dron autónomo puede aportar valor en galerías, zonas inestables o tareas de reconocimiento, pero solo si el sistema completo es robusto. La novedad del trabajo no está en usar un UAV, sino en acercar la computación suficiente para ejecutar control avanzado sin cargar todo el peso técnico sobre la aeronave.
También conviene mantener cautela. Es un paper, no un producto comercial listo para desplegarse. El propio sistema depende de infraestructura 5G privada, edge local, configuración de red específica y una integración técnica considerable. Muchas minas no tendrán todavía esa base instalada, y cada entorno subterráneo cambia las condiciones de radio, polvo, humedad, geometría y seguridad.
Aun así, la dirección es interesante. Si las redes privadas 5G y el edge industrial se consolidan, algunos robots podrán diseñarse con menos cómputo embarcado y más dependencia de una capa local compartida. Eso no elimina la necesidad de autonomía a bordo para casos de pérdida de enlace o emergencia, pero abre una arquitectura híbrida: el robot mantiene lo imprescindible para seguridad y percepción inmediata, mientras el edge absorbe control, planificación o aprendizaje más pesado.
La robótica útil en entornos duros rara vez avanza por un único gran salto. Avanza cuando sensores, comunicaciones, control y operación empiezan a funcionar juntos fuera del laboratorio. Este experimento apunta justo ahí.
Fuentes
- arXiv — Real-World Deployment of a 5G-Connected Edge-Controlled Aerial Robot in Industrial Subterranean Mines [en]
- PDF del paper — figura del dron 5G y datos de validación, licencia CC BY 4.0 [en]
- arXiv — A Kubernetes-Based Edge Architecture for Controlling the Trajectory of a Resource-Constrained Aerial Robot by Enabling Model Predictive Control [en]
- Imagen: Seisa et al. — plataforma aérea con módem y antenas 5G, arXiv CC BY 4.0 [en]