Numurus está intentando convertir NEPI en una capa común para robots y sistemas autónomos con edge AI: conectar sensores, ejecutar modelos, automatizar acciones y ofrecer una interfaz de control sin que cada equipo reconstruya la misma infraestructura desde cero.
La propuesta ha vuelto a asomar esta semana en The Robot Report, donde Jason Seawall, fundador y CEO de Numurus, plantea una comparación deliberada: el edge AI necesita para la robótica algo parecido a lo que Windows supuso para el PC. La analogía es discutible, pero el problema que señala es real. Hay más chips capaces de ejecutar IA en campo, pero integrar cámaras, lidar, sonar, motores, modelos y datos sigue siendo una parte lenta y cara del desarrollo robótico.
La capa invisible que consume meses
El hardware para edge AI ya no es el principal cuello de botella en muchos proyectos. NVIDIA, Qualcomm, AMD, Hailo y otros fabricantes han empujado módulos capaces de ejecutar visión, detección, clasificación o razonamiento local sin enviar todo a la nube. El problema aparece después: hacer que ese cómputo dialogue con sensores, actuadores, telemetría, modelos y aplicaciones de usuario.
Según la página oficial de NEPI, la plataforma está pensada para equipos que construyen robots, sensores inteligentes y sistemas autónomos sobre hardware NVIDIA Jetson o x86. Numurus la define como una plataforma de edge AI “source-available” basada en ROS 2, con drivers de hardware, gestión de modelos de IA, motor de automatización, captura de datos e interfaz web.
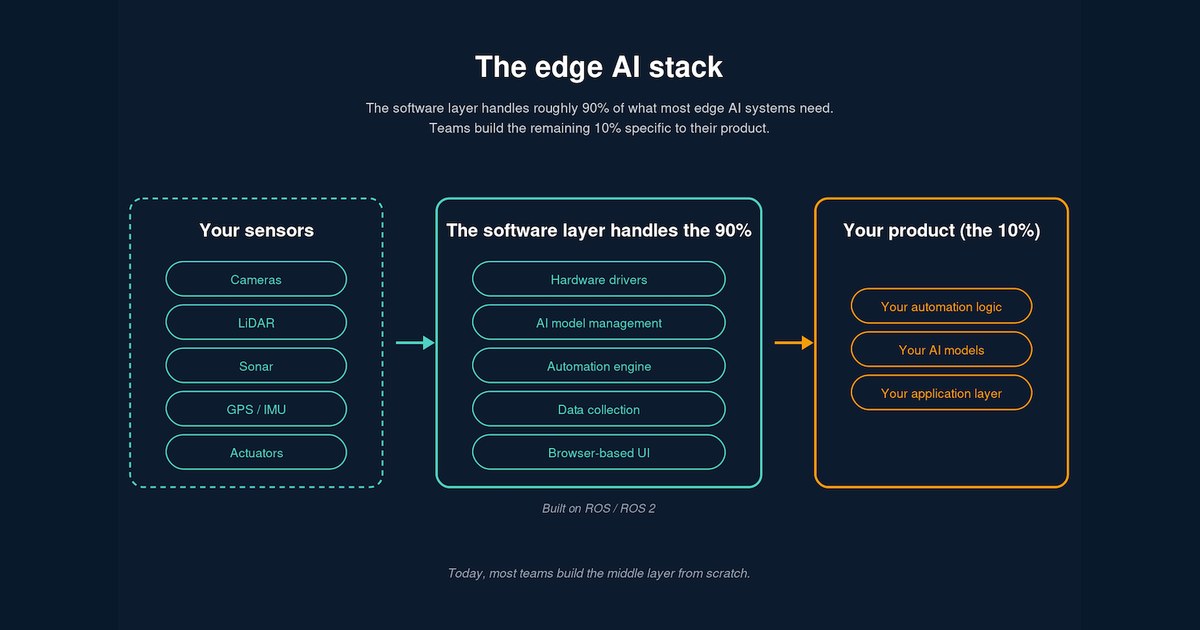
La idea práctica es separar lo repetido de lo diferencial. Numurus habla de una arquitectura 90/10: NEPI cubriría la mayor parte de la infraestructura común y el equipo del producto dedicaría el resto a su lógica propia, sus modelos y su aplicación. No es una cifra auditada, sino una forma de explicar el posicionamiento, pero apunta a un dolor conocido en robótica: muchas empresas acaban construyendo pipelines parecidos antes de llegar a la función que realmente vende su producto.
Sensores, modelos y acciones en el mismo flujo
En su artículo en The Robot Report, Seawall resume NEPI como una plataforma con drivers plug-and-play para cámaras, sistemas de navegación, motores, luces y control; soporte para detección y orquestación de modelos; aplicaciones de automatización integradas; y una interfaz de navegador para operar desde equipos conectados en red. También afirma que NEPI corre como contenedor Docker sobre el sistema operativo nativo del dispositivo edge.
Ese formato tiene sentido para robots que no tienen teclado ni pantalla. En una máquina móvil, un dron, un ROV o un sistema de inspección industrial, la operación suele hacerse desde otro ordenador. Una interfaz web residente evita depender de herramientas locales específicas y facilita que técnicos, operadores o investigadores puedan ver estado del sistema, flujos de sensor, salidas de IA y acciones sin tocar todo el stack bajo nivel.
La propia web de Numurus describe casos con vehículos submarinos, sonar inteligente, drones educativos y sistemas de investigación de campo. Lo relevante no es que NEPI sustituya a ROS, sino que intenta empaquetar la parte que normalmente queda entre ROS, drivers, despliegue de modelos, dashboards y automatización de eventos.
Una promesa útil, con límites claros
La lectura interesante no está en vender NEPI como una solución universal. En robótica, la fricción nunca desaparece por completo: cambian sensores, latencias, protocolos, seguridad, consumo, condiciones ambientales, errores de percepción y requisitos de cliente. Una plataforma común puede acelerar prototipos y primeras integraciones, pero cada despliegue serio seguirá necesitando validación en hardware real.
También conviene distinguir accesibilidad de simplicidad. Que una interfaz permita cargar modelos o ver datos en el navegador no significa que un robot quede resuelto. El diseño de la tarea, la calidad del dataset, la seguridad funcional, la recuperación ante fallos y la integración mecánica siguen siendo trabajo de ingeniería.
Aun así, el movimiento es relevante porque la IA física no escalará solo con chips más potentes o modelos más grandes. Necesita herramientas intermedias que reduzcan el coste de pasar de “tenemos un modelo” a “tenemos una máquina que lo usa en campo”. Si NEPI consigue resolver una parte apreciable de esa capa repetida, su impacto será menos vistoso que un nuevo robot humanoide, pero probablemente más útil para muchas empresas que intentan añadir percepción y autonomía a productos reales.
![Imagen: The Robot Report / Numurus — diagrama del stack edge AI de NEPI [en]](https://www.therobotreport.com/wp-content/uploads/2026/06/software_layer_diagram.png){kind=link}