Bell-Everman llevará a Automate 2026 una demostración centrada en robots pórtico de largo recorrido. La compañía expondrá dos sistemas en movimiento en el stand 34036 del McCormick Place de Chicago: un pórtico ServoBelt de doble puente en configuración XXYYZZ y una célula pick-and-place con viga de 12 pies en configuración XZZ.
La diferencia frente a una presencia ferial más convencional está en que ambos sistemas funcionarán como demostraciones operativas, no como maquinaria estática. En un sector donde muchas soluciones de automatización se explican con renderizados, vídeos o estaciones parcialmente cerradas, ver un pórtico de recorrido largo trabajar en directo ayuda a entender sus compromisos reales: rigidez, sincronización, repetibilidad, gestión de cableado y aprovechamiento del espacio.
Pórticos para mover más allá de una célula
El anuncio publicado por RoboticsTomorrow sitúa la demostración en el contexto de Automate 2026, que se celebra del 22 al 25 de junio en Chicago. Bell-Everman no va con un único actuador de catálogo, sino con dos arquitecturas de robot cartesiano pensadas para cubrir áreas de trabajo extensas.
El primer sistema, el ServoBelt de doble puente XXYYZZ, apunta a tareas donde dos puentes se desplazan sobre ejes largos y coordinan movimiento en varios grados cartesianos. Este tipo de diseño tiene sentido cuando el proceso no cabe cómodamente dentro de una célula compacta o cuando el producto, la pieza o el flujo de material exige cubrir una mesa, una línea o una zona amplia.
El segundo sistema será un pórtico pick-and-place con viga de 12 pies. La configuración XZZ sugiere una solución más enfocada a transferencia y manipulación vertical repetitiva: mover piezas entre posiciones, atender puntos separados o demostrar cómo un eje largo puede reemplazar varios robots estacionarios en determinados casos.
La idea de fondo no es nueva, pero sigue siendo relevante. Los robots articulados de seis ejes son muy flexibles, aunque esa flexibilidad no siempre es la forma más eficiente de cubrir metros de recorrido. En una línea grande, colocar varios brazos, bases, vallados y sistemas de alimentación puede añadir coste, huella y complejidad. Un pórtico bien diseñado sacrifica parte de la libertad angular, pero gana en alcance lineal, repetibilidad espacial y claridad de integración.
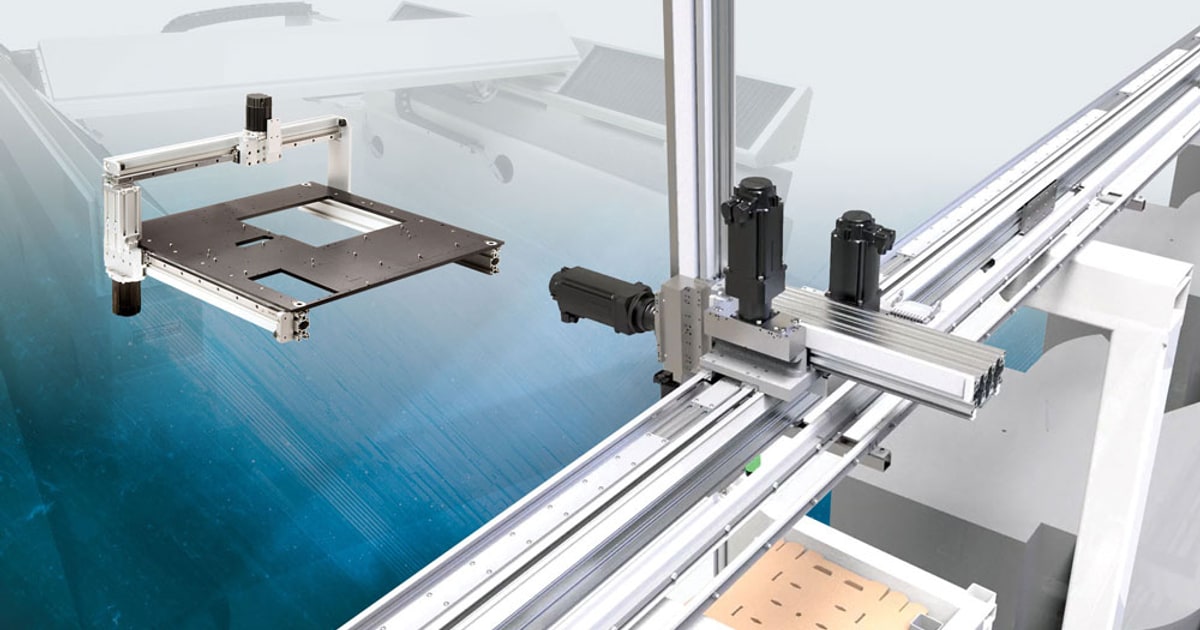
ServoBelt como tecnología de recorrido largo
Bell-Everman presenta sus robots lineales y pórticos alrededor de la tecnología ServoBelt Linear. En su documentación oficial, la empresa describe estos sistemas como robots cartesianos disponibles en configuraciones XY y XYZ, orientados a tareas que van desde transferencia de largo recorrido hasta etapas de movimiento de precisión.
La ventaja que más conecta con la demo de Automate es la escala. Bell-Everman afirma que sus pórticos basados en ServoBelt pueden alcanzar 100 metros o más en determinadas configuraciones de recorrido, y que ServoBelt Linear permite múltiples carros controlados de forma independiente sobre un mismo eje. Para automatización industrial, esa combinación es importante porque permite pensar en un eje como infraestructura compartida, no solo como un actuador aislado.
En la página técnica de ServoBelt Linear, la compañía da más contexto: habla de aplicaciones desde carreras cortas de precisión hasta robots de transferencia por encima de 50 metros, velocidades de hasta 4 m/s, precisión de ±4 micras por metro y repetibilidad bidireccional de ±1 cuenta de encoder. Son cifras de fabricante y deben leerse como especificaciones de producto, pero explican por qué Bell-Everman quiere enseñar sistemas en marcha. En pórticos largos, la promesa comercial no se entiende solo con una ficha: se valida viendo cómo acelera, frena y coordina masas reales.
Otro punto relevante es la posibilidad de montar varios carros independientes. En una planta con varias estaciones, eso abre opciones como atender máquinas separadas, mover materiales entre procesos o ejecutar operaciones paralelas en un mismo eje. No siempre será mejor que instalar varios robots articulados, pero en tareas de transferencia lineal repetitiva puede reducir duplicación de hardware y simplificar la geometría de la célula.
Qué conviene mirar en la feria
La demostración llega en un momento en el que Automate está concentrando muchos anuncios sobre IA física, cobots y humanoides. Frente a ese ruido, los pórticos de Bell-Everman representan una parte menos llamativa pero muy útil de la automatización: sistemas cartesianos que resuelven movimiento industrial de forma directa.
Para fabricantes, integradores y responsables de planta, la pregunta práctica no es si un pórtico parece más moderno que un brazo de seis ejes. La pregunta es si cubre mejor el área de trabajo, si permite mantener acceso para operarios, si reduce el número de robots necesarios, si simplifica el utillaje y si soporta el ritmo de producción con margen.
También habrá que distinguir entre demo y aplicación final. Un pórtico en feria puede mostrar suavidad, escala y coordinación, pero cada proyecto real depende de la carga, el efector final, el entorno, la seguridad, el control y la integración con máquinas existentes. Ahí Bell-Everman juega una carta lógica: además del hardware, ofrece ingeniería de sistemas, herramientas de fin de brazo y configuraciones de montaje para suelo, pared o techo.
Lo interesante del anuncio es precisamente que no vende una categoría abstracta. Lleva dos máquinas en movimiento para un problema concreto: cómo automatizar recorridos largos sin multiplicar brazos, bases y estaciones. Si la demo cumple, servirá como recordatorio de que buena parte de la robótica industrial sigue avanzando por mejoras de arquitectura mecánica, control de movimiento y diseño de célula, no solo por software o modelos de IA.
![Imagen: Bell-Everman - ServoBelt Linear In Action [en]](https://www.bell-everman.com/images/2023/08/08/be_gantry_1000.jpg){kind=link}