Aseon Labs ha salido del modo sigiloso con una idea menos vistosa que el último robotaxi, pero probablemente igual de necesaria si las flotas autónomas quieren operar muchas horas al día: un pod robótico que actúa como estación distribuida para cargar, limpiar e inspeccionar vehículos sin sacarlos de su zona de servicio.
La compañía lo resume como un “depot in a box” para coches autónomos. La formulación es deliberadamente simple, pero apunta a un cuello de botella real. Un robotaxi puede conducir sin una persona al volante, pero no se mantiene solo: necesita energía, limpieza interior, revisión exterior, detección de daños, retirada de objetos olvidados y ciclos de disponibilidad que no dependan de llevar cada vehículo a una gran base logística en las afueras.
Un pitstop para flotas sin conductor
Según la web de Aseon Labs, el sistema está pensado como una infraestructura autónoma, distribuida y siempre activa. La estación, llamada Aseon Pod en sus materiales de prensa, combina carga, limpieza e inspección para flotas autónomas directamente en las zonas donde circulan. Es decir: no pretende ser otro vehículo autónomo, sino una capa física alrededor del vehículo para que la operación diaria no vuelva a depender de procesos manuales.
Ese matiz importa. Gran parte de la conversación sobre robotaxis se concentra en percepción, mapas, sensores y seguridad vial. Pero la economía de una flota también depende de factores mucho más prosaicos: cuántas horas está disponible cada unidad, cuánto cuesta limpiarla entre viajes, cuántos kilómetros improductivos hace hasta un depósito, cuántas incidencias se detectan antes de que lleguen al siguiente usuario y qué ocurre cuando el vehículo necesita una recarga rápida en mitad de una zona de alta demanda.
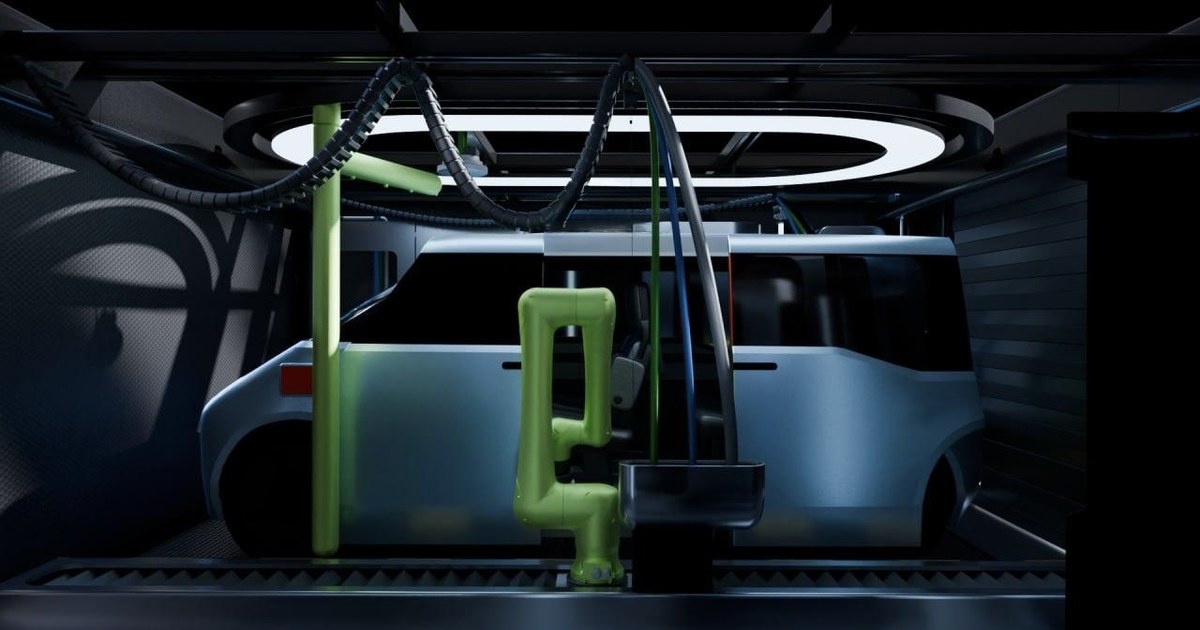
Aseon intenta empaquetar esa parte de la operación en una estación modular. Sus renders oficiales muestran un espacio cerrado con equipos de limpieza, brazo robótico, mangueras, sistemas de guiado y un vehículo dentro del pod. La empresa no publica todavía cifras de tiempo de ciclo, capacidad por estación, coste por instalación ni clientes confirmados, así que conviene leer el anuncio como una salida al mercado temprana, no como un despliegue masivo ya probado.
La experiencia previa no viene de la nada
El argumento más sólido de Aseon no es solo el render del pod, sino el historial operativo de sus fundadores. En su press kit oficial, la compañía explica que el equipo viene de construir y escalar Pushme, una red de infraestructura de movilidad con 5.000 estaciones en 40 ciudades, posteriormente adquirida por TIER-Dott. Esa experiencia no demuestra que el Aseon Pod vaya a funcionar, pero sí sitúa a la startup en un terreno menos ingenuo: desplegar hardware urbano, mantenerlo, operarlo y hacerlo convivir con flotas no es un problema puramente de software.
La ficha de Y Combinator también ayuda a dimensionar la empresa. Aseon figura como compañía fundada en 2026, dentro del batch Spring 2026, con un equipo de 5 personas, sede en San Francisco y actividad en Redwood City. Es una startup muy temprana, pero respaldada por YC y ya contratando perfiles de robótica, mecánica y electrónica. En otras palabras: el reto principal no será contar la historia de la autonomía, sino convertir un pod con brazos, sensores, fluidos, carga y seguridad en producto instalable.
TechCrunch ya recogió en mayo la salida de stealth de Aseon, con respaldo no revelado de Y Combinator, dentro de su cobertura de movilidad. La nota encaja en una tendencia más amplia: cuanto más madura parece la conducción autónoma, más visibles se vuelven los servicios auxiliares que permiten operarla a escala. Un robotaxi rentable no es solo un coche que conduce; es una cadena de mantenimiento, limpieza, energía, supervisión y soporte que debe funcionar con márgenes ajustados.
Una pieza pequeña de un sistema grande
El Aseon Pod no resuelve por sí solo la autonomía urbana. Tampoco elimina las preguntas regulatorias, de seguridad o de aceptación pública que rodean a los robotaxis. Su valor potencial está en otra parte: reducir la fricción entre el vehículo autónomo y la ciudad física. Si una flota puede recargar, resetear el interior e inspeccionarse cerca de los puntos de mayor demanda, se reduce el tiempo muerto y se abre la puerta a operar con menos infraestructura centralizada.
La cautela sigue siendo necesaria. Aseon no ha detallado todavía si sus primeros pods se orientarán a pruebas con operadores concretos, a pilotos cerrados, a parkings urbanos, a estaciones de carga reconvertidas o a acuerdos con redes de robotaxi. Tampoco está claro qué nivel de autonomía tendrá la propia estación ni cómo gestionará casos complicados: suciedad irregular, objetos olvidados, daños exteriores, nieve, vandalismo, fallos de carga o vehículos de distintos formatos.
Aun así, la dirección es interesante porque desplaza la conversación hacia una pregunta práctica: cuando los coches autónomos dejen de ser demos aisladas y empiecen a funcionar como flotas, ¿quién hace el trabajo invisible entre un viaje y el siguiente? Aseon apuesta por que esa respuesta también sea robótica. Si acierta, el mantenimiento distribuido puede convertirse en una de las piezas menos glamurosas, pero más críticas, de la movilidad autónoma.