Un equipo de Stanford ha presentado PanoVine, un robot blando de crecimiento continuo que usa cámaras distribuidas por todo su cuerpo para controlar la navegación en espacios complejos. La pieza interesante no es que el robot sea flexible, sino que intenta resolver un problema muy concreto: cómo dar feedback visual útil a una máquina larga, deformable y difícil de modelar.
Un robot que crece y mira desde dentro
Los robots tipo vine robot no se desplazan como un brazo industrial ni como un AMR. Crecen por eversión: el material del cuerpo se despliega desde la punta, alargando el robot mientras avanza por un entorno estrecho o lleno de obstáculos. Esa arquitectura tiene sentido para inspección, rescate, tuberías, vegetación densa o espacios donde un robot rígido no puede entrar, pero también crea un problema de control importante.
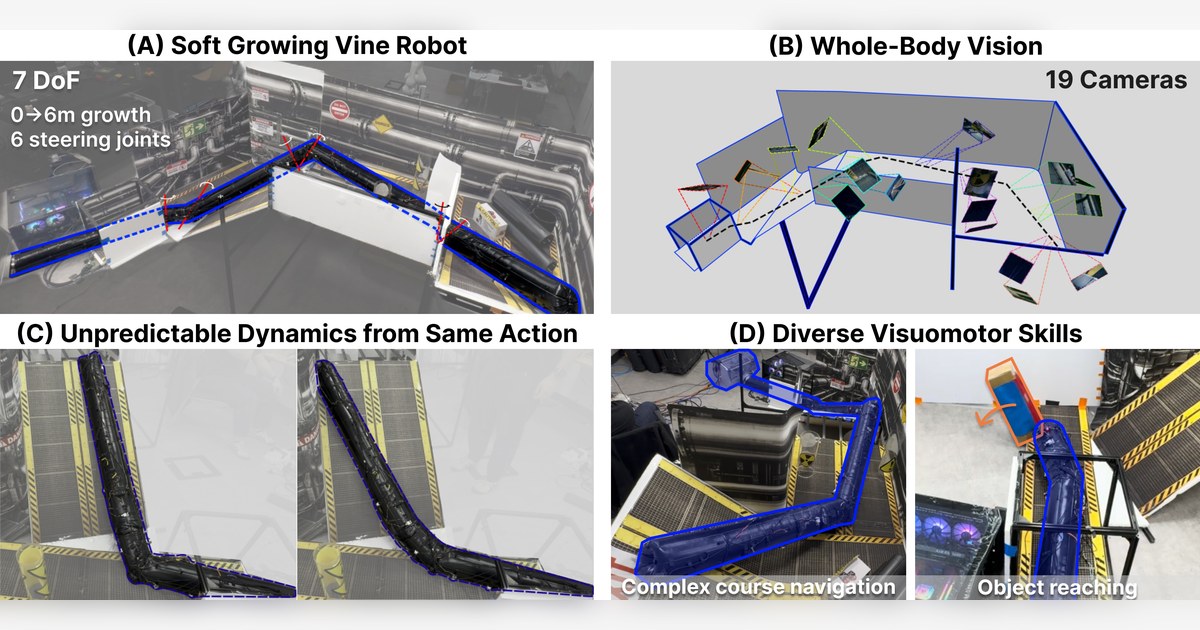
En PanoVine, según la página oficial del proyecto, el sistema combina un cuerpo blando de 6 metros, 7 grados de libertad y seis articulaciones de dirección con una red de 19 cámaras RGB montadas a lo largo del robot. A medida que el cuerpo se despliega, esas cámaras van quedando expuestas y aportan distintos puntos de vista del propio robot y del entorno.
Ese diseño ataca una limitación habitual de los robots blandos largos: una sola cámara, colocada en la base o en la punta, no basta para entender qué está pasando. El cuerpo se dobla, roza, se engancha, oculta partes del escenario y responde de forma distinta aunque reciba órdenes parecidas. Por eso el equipo describe PanoVine como un sistema de visión de cuerpo entero, más cercano a una percepción distribuida que a una simple cámara frontal.
Control visuomotor en vez de modelo rígido
El trabajo, publicado en arXiv el 22 de junio de 2026, plantea una política visuomotora entrenada con demostraciones teleoperadas. En lugar de depender solo de un modelo geométrico preciso, la política recibe imágenes de las cámaras y datos propioceptivos del robot para predecir acciones de crecimiento y dirección en bucle cerrado.
La diferencia es importante. En robots rígidos, modelar cinemática y dinámica ya puede ser complejo; en un robot blando que se deforma, interacciona con cables, roza con obstáculos y sufre histéresis, el modelo se vuelve todavía menos fiable. PanoVine intenta compensarlo con feedback visual continuo desde varios puntos del cuerpo.
Los resultados que comunican los autores son de laboratorio, pero tienen cifras útiles. En un recorrido de 6 metros y 1,5 metros de alto que encadena selección de rama, subida por una pendiente de 45 grados, paso por un hueco sin soporte, evitación de obstáculos y un giro final cerrado, la política de PanoVine alcanza un 80% de éxito. Una reproducción abierta de una demostración humana, sin cerrar el bucle con visión, falla en todos los ensayos.
En una segunda tarea de alcance preciso, el robot debe alinear su punta con objetos situados en distintas posiciones tras 2 metros de crecimiento. Ahí la política multicámara llega al 85% de éxito, mientras que la versión con una sola cámara en la base obtiene 0%. El dato resume bastante bien el punto técnico del trabajo: en un cuerpo largo y deformable, ver desde un único lugar deja de ser suficiente.
Por qué importa para la robótica blanda
PanoVine no es un producto comercial ni un robot listo para desplegar mañana en una central, una alcantarilla o una zona de rescate. Es una plataforma de investigación. Aun así, el enfoque apunta a una dirección relevante para la robótica blanda: pasar de mecanismos capaces de entrar en lugares difíciles a sistemas que además puedan tomar decisiones con feedback propio.
Ese salto es más difícil de lo que parece. Los robots blandos se justifican precisamente porque toleran contacto, curvatura y geometrías complicadas. Pero esas mismas propiedades hacen que controlar su forma sea menos predecible. Si cada tramo del cuerpo puede aportar visión local, el robot tiene más opciones de reaccionar a lo que encuentra en vez de limitarse a repetir una trayectoria aprendida.
El repositorio de código de PanoVine en GitHub también sugiere una intención de reproducibilidad: incluye instrucciones para procesar datos, entrenar la política e inferir sobre el robot, aunque el propio README aclara que la parte de recogida de datos e inferencia en hardware requiere ROS Noetic y controladores específicos del robot. Es decir, no estamos ante un paquete que cualquiera pueda ejecutar sobre cualquier plataforma, pero sí ante una publicación con más material que un vídeo aislado.
La cautela principal está en la escala de los experimentos. El artículo reconoce que el sistema usa cámaras RGB de campo de visión limitado, que todavía no incorpora señales de contacto o fuerza distribuidas y que cada tarea se aprende con decenas de demostraciones en una sola configuración de robot. Para salir del laboratorio haría falta más robustez, más datos, sensores más ricos y pruebas en entornos menos preparados.
Con todo, PanoVine aporta una señal interesante: la IA física no tiene por qué vivir solo en humanoides o brazos industriales. También puede aparecer en robots blandos, largos y extraños, donde la prioridad no es parecerse a una persona, sino moverse por sitios donde una persona o una máquina rígida lo tienen difícil.